
国際特許分類[F16H59/50]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 回転運動を伝達するための変速あるいは逆転伝動装置のための制御入力 (10,329) | 入力が機械の状態に関するもの,例.ドア,または安全ベルトの位置 (699)
国際特許分類[F16H59/50]の下位に属する分類
機械の重量に依存するもの,例.バスの乗客に基づく重量の変化 (54)
ブレーキからの信号に依存するもの,例.パーキングブレーキ (399)
主クラッチからの信号に依存するもの (102)
舵取り装置からの信号に依存するもの (57)
国際特許分類[F16H59/50]に分類される特許
1 - 10 / 87
車両の変速制御装置
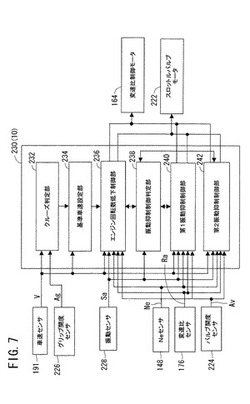
【課題】クルーズ時におけるエンジンの低Ne化の制御中において、車両に振動が発生した場合に、迅速に共振から回避することができ、しかも、車速の変動を抑えることができる車両の変速制御装置を提供する。
【解決手段】クルーズ走行状態と判定されると、目標エンジン回転数Npを所定のクルーズ回転数に設定すると共に、車速Vが一定となる関係で、無段変速機106により、変速比を小さくしつつ、エンジン回転数Neを目標エンジン回転数Npに向けて低下させるエンジン回転数低下制御部236と、エンジン回転数の低下制御中に、振動抑制制御判定部238により、車体振動値Saが所定値Sth以上であると判定したときに、無段変速機106により、エンジン回転数Neを制御して、車体振動値Saが所定値Sth未満になるように制御する第1振動抑制制御部240及び第2振動抑制制御部242とを有する。
(もっと読む)
自動変速機の油圧制御装置

【課題】自動変速機の油圧制御回路におけるソレノイドバルブへの通電故障時発生時に、急減速を抑制しながら、再発進時等における良好な加速性能を実現する。
【解決手段】通電状態でライン圧に基づく制御圧を減圧して出力するソレノイドバルブ103と、ライン圧を所定の高速段を達成するためのハイクラッチ50に供給する第1状態とライン圧を所定の低速段を達成するためのロークラッチ40に供給する第2状態との切り換えが可能なハイカットバルブ114とを備え、通電故障時、Dレンジでの走行中は、前記ハイカットバルブ114を第1状態に保持して前記高速段での走行を可能とすると共に、Nレンジに切り換えられたときに、前記ソレノイドバルブ103から出力される制御圧が変化して前記ハイカットバルブ114が第2状態に切り換えられることにより、Dレンジでの再発進時等に前記低速段を達成する。
(もっと読む)
自動二輪車の変速制御装置
【課題】車体のロール角に応じて駆動力伝達の態様が異なる変速制御を実行できる自動二輪車の変速制御装置を提供する。
【解決手段】自動二輪車1のエンジン13の回転駆動力を変速して後輪WRに伝達するツインクラッチ式変速機23の変速制御装置において、車体のロール角θがフルバンク状態に相当する第2のロール角θ1から第1のロール角θ2まで間の場合(例えば、45〜20度。領域C)には、通常変速制御より駆動力の経時的変化が小さいソフト変速制御によって変速動作を行う。第1のロール角θ2と第3のロール角θ3との間(例えば、20〜10度。領域B)であれば通常変速とし、直立状態から第3のロール角θ3との間(領域A)であれば通常変速制御より駆動力の経時的変化が大きいダイレクト変速で変速動作を実行する。ロール角θが第2のロール角θ1より大きい場合(領域D)は変速を禁止する。
(もっと読む)
作業車両
【課題】ラグが大きく、排土性の高いタイヤ又はクローラを備えた作業車両において、ラグによる振動ならびに騒音を抑制することができる技術を提供する。
【解決手段】エンジン2の回転動力によって駆動される無段変速装置31と、前記無段変速装置31によって駆動されるタイヤ4・4・6・6又はクローラ17・17と、前記無段変速装置31を制御することによって前記タイヤ4・4・6・6又はクローラ17・17の駆動状態を変更させる制御装置9と、を備えた作業車両100であって、振動加速度Gを検出するとともに前記制御装置9へ検出信号を送信する振動センサ91を具備し、前記制御装置9は、振動加速度Gが所定の値Glよりも大きい場合に前記タイヤ4・4・6・6又はクローラ17・17のラグRによる振動周波数が所定の固有振動数の共振発生領域にあると判断し、前記無段変速装置31を制御して走行速度Vを変更させる、とした。
(もっと読む)
車体制振制御装置
【課題】車体振動抑制用エンジントルク補正量が制御分解能未満でも、変速により、車体振動抑制用エンジントルクを補正制御する。
【解決手段】サスペンション装置を介して車輪を懸架された車両のバネ上質量である車体の振動を、駆動力補正制御により抑制するための車体制振制御装置において、車体振動を抑制するための制振用駆動力補正量を演算して、駆動力補正制御に資する制振用駆動力補正量演算手段と、該手段で求めた制振用駆動力補正量が設定値未満であるとき、駆動力の伝達系における変速比をハイ側へ変更する変速比変更手段とを具備する。
(もっと読む)
車両用エンジン回転制御装置
【課題】車両の動力伝達装置に含まれる変速機の変速制御とエンジンの始動制御とが重なる場合において、運転者の意図に応じたエンジンの始動を可能にする車両用エンジン回転制御装置を提供する
【解決手段】変速制御およびエンジン始動制御の実行判断が重なった場合において(SA1およびSA2が肯定)、運転者の駆動力変化要求がある場合には(SA3が肯定)、エンジン始動方法が変更され、かつ、エンジン始動制御と変速制御のいずれか一方の実行中であっても他方が実行され、駆動力変化を速やかに出力する(SA4)。一方運転者の駆動力変化要求がない場合には(SA3が否定)、エンジン始動制御と変速制御のいずれか一方が実行され、その実行後に他方が実行されることにより、ショックが低減される(SA5)。これにより、運転者の意図に応じたエンジン始動制御が実現される。
(もっと読む)
車両の運動制御装置
【課題】車両の操作状態量や運動状態量を検知するセンサからの信号が異常な場合にも、運転者に違和感を与えない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act、実ヨーレートγactを偏差演算部55に入力する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d、規範ヨーレートを算出して偏差演算部55に入力する。仮想外力演算部61は、偏差演算部55から出力される偏差にもとづいて、規範動特性モデル演算部54に仮想外力Mvをフィードバックする。このとき、仮想外力演算制御部62が、前記したセンサからの信号の検知状態にもとづいて、仮想外力の補正を制御する。
(もっと読む)
車両用制御装置および車両用制御方法
【課題】アクセルペダルの踏み込み量の増加に対して応答性よく車両に発生する駆動力を増加させる。
【解決手段】ECUは、2WDモードでないと(S100にてNO)、4WDモードに対応する出力特性を選択するステップ(S104)と、走行状態を判定するステップ(S106)と、4WDモード選択時に車両に要求されるトルクを算出するステップ(S108)と、リアモータに要求されるトルクを算出するステップ(S110)と、第2のオルタネータに要求される発電電力を算出するステップ(S112)と、第2のオルタネータに対する制御出力を算出するステップ(S114)と、リアモータの出力トルクを推定するステップ(S116)と、第2のオルタネータの負荷を算出するステップ(S118)と、変速比の目標値を算出するステップ(S120)と、エンジンに対して要求される出力を算出するステップ(S122)と、エンジン対して要求される駆動力を修正するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
産業車両の変速制御装置
【課題】作業効率の低下を防止できる産業車両の変速制御装置を提供する。
【解決手段】バケット112の高さが第1設定高さを超えると、変速許可速度を上昇させて、シフトアップが起こり難くなるように構成した。これにより、たとえば、Vシェープローディングにおいてアクセルペダル11を大きく踏み込まない状態であっても、変速許可速度の低下によるオペレータの意図に反するシフトアップ、およびこのシフトアップに起因するホイールローダ100の増速を抑制できる。したがって、ダンプトラックへの積み込みに必要な高さまでバケット112が上昇する前にホイールローダ100がダンプトラックに到達してしまう、という不具合を防止して、作業効率の低下を防止できる。
(もっと読む)
無段変速機の制御装置
【課題】ACGにより消費される駆動トルクの補正精度を向上させることができる無段変速機の制御装置を提供する。
【解決手段】AT−ECU20は、回転数センサ101により検出されたエンジン1の出力回転数(エンジン回転数)NEと、ACG発電量センサ111により検出されたACG30の発電量ACGFと、バッテリ電圧センサ112により検出されたバッテリ40の電圧VBとを取得する。AT−ECU20は、これらのデータに基づいてACG30の駆動トルクを算出し、算出されたACG駆動トルクに基づいて油圧制御装置7で生成されるライン圧を補正する。これにより、無段変速機3内のベルト側圧を適正化することができるとともに、油圧制御装置7内の油圧ポンプのフリクションを低減することができる。
(もっと読む)
1 - 10 / 87
[ Back to top ]