
国際特許分類[F16P3/14]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 安全装置一般 (119) | 機械の運転制御に関連して作動する安全装置;同時に身体の二個所以上を用いることを要する制御装置 (90) | 危険区域に身体の一部が位置した場合機械の運転制御に影響する手段をもつもの,例.フィーラ (42) | 機械的接触なしで反応する光電管などの装置 (36)
国際特許分類[F16P3/14]に分類される特許
1 - 10 / 36
人体検知方法及び人体検知システム
【課題】自動車ボディの塗装ブースなどに用いられ、人が静止している場合、或いは人の動きが非常に小さい場合でも人の存在を検知することができる、検知精度に優れた人体検知方法及び安価な人体検知システムを提供する。
【解決手段】人の侵入を検知すべき場所に設置されて、当該場所内の人の存在を検知する赤外線センサ3と、前記赤外線センサ3をスイングさせるスイング手段30とを備える人体検知システムとする。
(もっと読む)
安全コントローラ

【課題】ロックアウト出力を迅速に解除する。
【解決手段】安全センサ40の出力ラインL1、L2が接続されるセンサ用入力端子X1、X2と、リセット入力を受け付けるリセット用入力端子X1、X2と、装置の異常の有無を判定する判定部30と、前記異常が有る場合には、制御対象の機器に対してロックアウト出力を行う出力部30と、を備えた安全コントローラ20であって、前記判定部30は、前記ロックアウト出力中に前記リセット入力があった場合には、前記異常の有無を再判定すると共に、前記出力部30は、前記再判定にて異常なしと判定される場合には、前記ロックアウト出力を自動解除して、前記制御対象の機器に対して前記安全センサ40の出力に応答した応答出力を行う。
(もっと読む)
無線操縦による開閉安全フック製造方法
【課題】無線操縦による開閉安全フック駆動機制御装置は、連結システム構造の伝導駆動機を決定とした一連維持ができ、作業を迅速に行うことが可能なことから作業性・能率性・効率性・生産性の向上を提供する。
【解決手段】トラブルによる作動停止や危険極まりない作業条件を安心・安全しかも、無線操縦による開閉安全フック機能で省力化を図る。無線操縦開閉安全フックによって、作業性・能率性・効率性・生産性の向上が得られる。
(もっと読む)
安全制御装置、ロボット、システム、プログラム、及び、記録媒体
【課題】安全制御手段を内蔵したロボットと併用することによって、該安全制御手段を2重化することができ、また、該ロボットと別個に使用することができる安全制御装置を実現する。
【解決手段】安全制御装置2は、センサにより検出された外界の状態に応じて内部状態を遷移させるか、または、安全制御手段11bにより発行されたコマンドに応じて内部状態を安全制御手段11bと同期させるFPGA基板21であって、内部状態を安全制御手段11bと同期させるときに、センサにより検出された外界の状態が予め設定された特定の条件を満たしているか否かを判定し、満たしていないと判定した場合にはサーボ機構12への電力供給を断つFPGA基板21を備えている。
(もっと読む)
ロボット制御システム
【課題】 作業員とロボットとが接近する状況になったとき、用途別に複数のセンサを用いることなく、ロボットを停止または減速動作させて、作業員の安全を確保する。
【解決手段】 作業員が人体を介して通信を行う携帯装置8を携帯し、ロボット制御装置1は人体を介して通信が可能なロボット2を制御する。作業員とロボット2とが接近すると携帯装置8とロボット2と間で人体通信が開始され、これを検出したロボット制御装置1は予め設定した動作命令に従ってロボットを停止または減速動作させ、アラーム情報を携帯装置8に送り、作業者に警報を知らせる。
(もっと読む)
安全システム、ミューティングセンサ装置およびセーフティセンサ装置
【課題】設置が簡単なミューティングセンサを備える安全システムを提供する。
【解決手段】ミューティングセンサ6は、ワーク5に付設されたRFIDタグ12の情報を、読み取り書き込み装置13で読み取ってワーク5を、セーフティライトカーテン4によって検知される前に検知し、コントローラ8にミューティング用の出力を与え、コントローラ8は、前記ミューティング用の出力に応答して、セーフティライトカーテン4の検知機能を無効化するようにしており、ミューティングセンサ6では、読み取り書き込み装置13を、ワーク5がセーフティライトカーテン4によって検知される前に、検知するように設置するだけでよく、ワークと作業者とを同じ遮蔽物として区別することなく、複数組の光電センサからなるミューティングセンサを設置する従来例に比べて、設計、設置が大幅に簡素化される。
(もっと読む)
操作インタフェースを含む部分が操作者に対して移動可能な装置を制御するための技術
【課題】作業者の意図を考慮に入れた判断を行うことによって、パワーアシスト装置の動作を適切に制御するための技術を提供する。
【解決手段】操作者の手によって操作される操作インタフェースを備え、且つ少なくとも該操作インタフェースを含む部分が該操作者に対して移動可能である装置のための、制御技術であって、操作者の腕部までの距離を少なくとも計測しうる第1の距離センサと、該操作者の下体までの距離を少なくとも計測しうる第2の距離センサと、第1及び第2の距離センサによる計測値に対して所定の演算を行い、該演算の結果に基づいて第1の信号を出力する演算処理手段とを備え、前記所定の演算が、接近する操作インタフェースを操作すべく該操作インタフェースに操作者が手を差し伸べる際の、予め調べられたデータパターンを用いて、センサによる計測値を処理することを特徴とする。
(もっと読む)
警報システム
【課題】製造設備の稼働率を低下させることなく作業者が危険部に近づく作業を行う際の事故の発生を防止する。
【解決手段】製造設備に設けられる警報システムは距離センサ21を有し、距離センサ21のセンサヘッド211は製造装置10の搬送装置19側の危険部10b近傍に取り付けられ、監視領域212内における危険部10bと作業者9との間の距離である作業者距離dを測定する。作業者9が一次警告領域2121に進入すると距離センサ21からの信号に基づいて警報部が第1警告音を発し、作業者9が危険部10bにより近い二次警告領域2122に進入すると警報部は第1警告音より警告の程度が高い第2警告音を発する。これにより、製造設備の稼働率を低下させることなく作業者9が危険部10bに近づく作業を行う際の事故の発生を防止することができる。
(もっと読む)
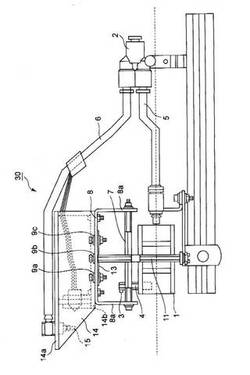
産業ロボットシステムにおける複数軸の制御方法および産業ロボットシステム
本発明は、ロード領域およびプロセス領域を含む作業セルと、人がロード領域に入ったときを検出する検出器(6)と、作業セル内に位置するマニピュレータと、工作物を保持するとともに、マニピュレータが工作物を加工する間に少なくとも1つの軸周りで工作物の方向を変化させるように構成されている少なくとも1つのポジショナと、1つの軸周りで可動であるとともに、コマンドを受け取ると、マニピュレータまたはポジショナをロード領域とプロセス領域との間で移動させるように構成されているステーション交換器とを備える産業ロボットシステムに関する。各軸にはモータ(M1−M3)と駆動ユニット(53−55)とが設けられる。軸コントローラ(50)は、ポジショナおよびステーション交換器の軸に停止を命令する第1のタスクと、ポジショナおよびステーション交換器の軸の動きを可能にする第2のタスクとの間で実行を切り換えるように構成されている。安全コントローラ(58)は、人がロード領域に入っていることを検出すると、ステーション交換器またはポジショナが動いているかどうかを監視するとともに、監視される軸のいずれかが動いていることが検出される場合、動いている軸の駆動ユニットを使用不能にする信号を生成するように構成されている。 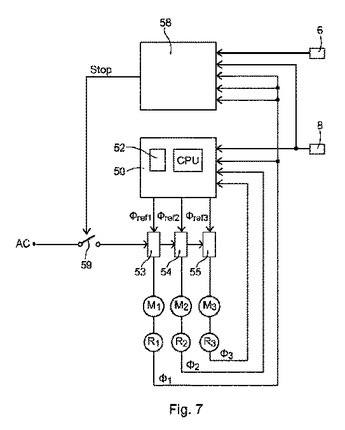 (もっと読む)
(もっと読む)
工作機械
本発明は、工作機械、特に鋸機械であって、加工したいワーク(16)を配置するための作業面(14)と、作業面(14)に対して相対的に可動に支承されている、工具(18)を支承するための工具支承ユニット(20)とを有している形式のものに関する。前記工作機械が、ビーム(SR)のスペクトル評価によって、工具領域(68)における物質の存在を検出するように設けられた検出ユニット(82)を有していることが提案される。 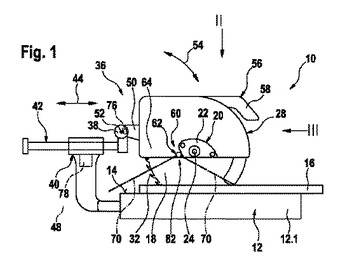 (もっと読む)
(もっと読む)
1 - 10 / 36
[ Back to top ]