
国際特許分類[G01B21/30]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | このサブクラスの他のグループの,個別の形式の測定手段に適合しない測定装置またはその細部 (1,964) | 表面の粗さまたは不規則性測定用 (236)
国際特許分類[G01B21/30]に分類される特許
101 - 110 / 236
塗装検査装置及び塗装検査方法
【課題】塗装の補修により発生する微小傷群を、作業者が確実に視認することが可能であって、作業者の官能に頼らず客観的に塗装の良否を判断できる装置を提案する。
【解決手段】塗装面Fの検査部位Faに光を照射する照明手段11と、検査部位Faの表面での反射光を撮像する撮像手段12と、該撮像手段12から信号を受けて画像処理を行う画像処理手段21と、検査部位Faの表面と撮像手段12との距離を検出する変位検出手段13Aと、検査部位Faの表面と撮像手段12の光軸との垂直度を検出する垂直度判定手段13Bと、変位検出手段13A・垂直度判定手段13Bからの信号を受けて撮像手段12と検査部位Faの表面との距離及び角度が検査可能な状態であるか否かの判定を行う判定手段13とを、塗装検査装置8に備えた。変位検出手段13A及び垂直度判定手段13Bとして超音波式変位センサを採用し、距離と同時に垂直度を検出可能とした。
(もっと読む)
走査型プローブ顕微鏡の探針制御方法

【課題】 試料表面の凹凸形状等を予め決められた測定点についてステップイン方式で測定し、測定のスループプットを高め、探針の衝突による破損・ダメージを減少できる走査型プローブ顕微鏡の探針制御方法を提供する。
【解決手段】 この探針制御方法は、探針20と試料12の相対的な位置関係を変化させ、探針が試料の表面を走査しながら測定部で試料表面を測定する走査型プローブ顕微鏡に適用される。測定点に関する探針の走査移動では、XY微動機構29またはXYステージ14によって、探針を試料と非接触状態にて一定間隔で送る行程と、測定点で探針を前記試料に接近・接触させる行程と、探針を試料から退避させる行程を行う。さらに予定された次の測定点に探針を移動する行程で、次の測定点での測定位置をその前の少なくとも2つの測定点の測定値によって予測するステップと、予測により測定点の接近開始位置を決定するステップとを含む。
(もっと読む)
回転精度測定方法
【課題】
3個の変位計間の相対角度が正確であるかどうかを評価することができ、回転軸の回転ムラを補正することができ、変位計の中心位置が回転軸上の同じ測定部位を指しているかどうかを評価することができ、ひいては3点法の特性を有効にかつ容易に活用して回転軸の回転精度を測定することができる回転精度測定方法を提供する
【解決手段】
それぞれの中心位置が回転する測定対象物の外周面上の同一回転軌跡上にあるように配置した3個の非接触型の変位計のプローブによって前記測定対象物の回転運動を測定し、前記測定対象物の回転精度成分と前記測定対象物の形状成分とを含む前記変位計の出力信号を処理して前記形状成分を分離して前記測定対象物の回転精度を測定する方法であって、前記処理の前に前記変位計の出力信号における前記回転の回転速度のムラを補正する
(もっと読む)
表面凹凸測定における異常測定値の検出方法
【課題】表面の凹凸測定における異常測定値の検出方法に関し、適正なしきい値の設定ができ、異常値のないデータに対して正常値を異常値としたり正常な測定値をゆがめたりすることがなく、異常値が密集して表れたときの検出も可能な方法を提供する。
【解決手段】測定面に多数の格子点P(i,j)と、格子点を中心とする近接領域と、判定レベルLとを設定し、各格子点P(i,j)とその近接領域内にある近接格子点P(i1,j1),P(i2,j2)・・・との間の高低差の絶対値の中央値を当該各格子点の偏倚値S(i,j)とし、当該偏倚値を全格子点について求め、ある偏倚値Sより偏倚値S(i,j)が小さい格子点の数と全格子点の数との割合がpであるときの前記ある偏倚値Sを確率偏倚値S(p)としてその確率偏倚値の変化率S(p)/S(p-a)が判定レベルLを越える偏倚値を有する格子点の測定値を異常値とする。
(もっと読む)
シェル形外輪の形状測定装置およびシェル形外輪の軌道面の真直度および平行度の測定方法
【課題】 ころを安定して転動させることができるシェル形外輪の軌道面の真直度および平行度を測定する形状測定装置を提供する。
【解決手段】 シェル形外輪の形状測定装置は、内径穴35を有する基準リング32と、内径穴35に圧入されたシェル形外輪22の内径面26および基準リング32の外径面または内径面の母線形状を測定するプローブ部33と、プローブ部33を軸方向に走査して移動させるプローブ移動手段とを有する。
(もっと読む)
取付精度判定装置
【課題】 軸付フランジ部材の取り付け精度の判定をより適正かつ精度よく行なうと共に取り付け精度を判定する際の操作をより簡易なものにする。
【解決手段】 Vブロック22と位置決め部24とにより支持されたプランジャー10の軸14に対して角度αをもって当接するアーム部32を往復運動させる回転駆動部30と、フランジ部12の回転に伴ってその取付精度(垂直度)を検出する検出部40と、検出後に払い出されるプランジャー10を受け止める受け部50とにより取付精度判定装置20を構成し、アーム部32の一方向への運動により軸14の位置決め部24方向に作用する力を用いてプランジャー10を完全に位置決めして取付精度を判定し、アーム部32の他方向への運動により軸14の受け部50方向に作用する力を用いてプランジャー10を払い出す。
(もっと読む)
平面度測定装置及び平面度測定方法
【課題】 測定対象ベルトの平面度を精度良く測定する。
【解決手段】 互いに平行となるように所定間隔をもって配置された一対の円柱状部材と、前記一対の円柱状部材に架け渡された測定対象ベルトの平面度を測定する測定手段と、前記測定手段による平面度測定前に、前記測定対象ベルトが搭載される被搭載装置に該測定対象ベルトが搭載された時に該測定対象ベルトに作用する予め定められた規定荷重に、該規定荷重との合計荷重が該測定対象ベルトの破損限界荷重未満となるような追加荷重を加えた合計荷重を、前記一対の円柱状部材の少なくとも一方を介して該測定対象ベルトの長手方向に加えた後に、該合計荷重から前記追加荷重を除いた前記規定荷重を前記測定対象ベルトの長手方向に加える張架手段と、を備える。
(もっと読む)
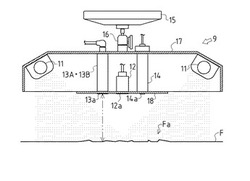
シームレスベルトの平面度測定方法、平面度測定装置、シームレスベルト、シームレスベルトの判定方法、及び該シームレスベルトを備えた画像形成装置
【課題】シームレスベルトの周方向における平面度を簡易にかつ正確に測定しうる平面度測定方法、その測定装置、及び高温高湿又は低温低湿下に保管したシームレスベルトを、前記平面度測定方法により測定される平面度に優れるか、どうかを判定するシームレスベルトの判定方法及び該シームレスベルトを備える画像形成装置を提供すること。
【解決手段】少なくとも2本のロールを用いて所定の張力で張架され、かつ、回転させない状態でのシームレスベルト1の表面に対し、平面度測定装置9を該シームレスベルト1の周方向に走査することを特徴とするシームレスベルト1の平面度測定方法、その測定装置、該平面度測定方法を用いてシームレスベルト1の判定方法。また、高温高湿又は低温低湿下に保管しても、上記平面度測定方法により測定される平面度が全周に亘り5mm以下であるシームレスベルト1、及び該シームレスベルト1を備える画像形成装置。
(もっと読む)
路面性状測定装置
【課題】一台でキメ深さやIRIを測定できる多機能の路面性状測定装置であって安価かつ高精度なものを車載可能とすべく、移動距離計の測定値からタイヤ変形等の悪影響が取り除かれるようにする
【解決手段】車両に移動距離計15と高さ計16と高さ計51と演算部20とを搭載する。高さ計16,51には、排水用凹部の開口幅より短い第一基準長Nに対応した狭い範囲を測定するものを、採用する。演算部20は、移動距離測定値ΔSと高さ測定値K,Jとに基づき踏面算出を行って第二基準長M対応のIRIを算出し、移動距離測定値ΔSと高さ測定値Kとに基づき踏面算出を行わないで第一基準長N対応のキメ深さ等を算出し、更に基準長Mだけ離れた高さ計16,51での路面形状について相関を算出して選択的に移動距離測定値ΔSを校正する。
(もっと読む)
平坦度計測方法および装置
【課題】 ワークの平坦度を高精度に計測できる方法,装置を提供する。
【解決手段】 ワークWは、基準筒面Wbと基準筒面Wbの中心軸線と直交する平坦面Wcとを有する。ワークWは、中心軸線を略中心にして回転される。第1,第2の計測手段60,70は、軸方向に離れ基準筒面Wbに対峙して配置され、ワークWが所定角度回転する度に、基準筒面Wbにおいて計測手段60,70に対峙する環状領域の位置を計測する。第3計測手段80は平坦面Wcに対峙して配置され、ワークが所定角度回転する度に、平坦面Wcの位置を計測する。計測手段60,70の位置情報から、基準筒面Wbの中心軸線と直交する基準平面を実質的に求め、第3計測手段で計測された位置情報をこの基準平面からの位置情報に補正し、この補正情報に基づき平坦度を演算する。
(もっと読む)
101 - 110 / 236
[ Back to top ]