
国際特許分類[G01B21/30]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | このサブクラスの他のグループの,個別の形式の測定手段に適合しない測定装置またはその細部 (1,964) | 表面の粗さまたは不規則性測定用 (236)
国際特許分類[G01B21/30]に分類される特許
11 - 20 / 236
直線度検査方法
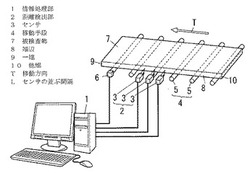
【課題】設置場所の制限を軽減すると共に、コストの増加を抑えて、被検査物の端辺の直線度を検査可能な直線度検査方法を提供する。
【解決手段】この課題を解決するために、被検査物7の平面視における端辺8の直線度を検査する検査方法であって、前記端辺8までの距離に対応した情報を検出する距離検出部2と、被検査物7を距離検出部2に対して端辺8の一端9側から他端10側に向けて移動させる移動手段4と、距離検出部2の検出結果から端辺8の直線度を求める情報処理部1と、を備えると共に、距離検出部2が移動手段4による移動動作の移動方向Tに沿って並ぶ二つ以上のセンサ3を有し、被検査物7の移動量がセンサ3の間隔Lのセンサ3の数から1減算した値以下の整数倍になる毎に、距離検出部2が前記情報の検出動作を行うものとした。
(もっと読む)
平坦度測定装置及び平坦度測定方法

【課題】コンベアベルトの振動の影響を補正できる平坦度測定装置及び平坦度測定方法を提供する。
【解決手段】コンベアベルト34と、前記コンベアベルト34を回転することにより駆動するロールと、前記コンベアベルト34の振動を検出するための第1のセンサ38と、シート32の先端の高さ位置を測定するための第2のセンサ40と、前記第1のセンサ38からの信号と、前記第2のセンサ40からの信号と、を受信して解析するための制御部と、を備え、前記制御部は、前記コンベアベルト34の接続部が前記ロール上に無いと判断したときは、前記第2のセンサ40からの信号に基づいて前記シートの平坦度を算出する際、前記第1のセンサ38からの信号に基づいて前記コンベアベルト34の振動による影響を補正した平坦度を算出し、前記コンベアベルト34の接続部が前記ロール上にあると判断したときは、前記シート32の平坦度を算出しない平坦度測定装置。
(もっと読む)
ウエハ平坦度測定法
【課題】ウエハの平坦度検査を高精度かつスループットの高い方法で実現する。
【解決手段】回転運動および直線運動機構の運動誤差を補正することの可能な3点法を、ウエハ101と検出器9の相対的な回転運動によるウエハ外周の形状測定と、ウエハ101と検出器9の相対的な直線運動によるウエハ直径方向の形状測定に適用し、両者の組み合わせによりウエハ全体の形状を測定できるようにした。
(もっと読む)
被加工物の真直度校正方法
【課題】 表面形状測定装置を介して工作機械のワークテーブル上の加工ワークの真直度を測定し、その測定された真直度の値を校正する方法の提供。
【解決手段】 一対の平面鏡(M1,M2)を距離d離して両端に設けた姿勢表示物体2を1個、変位センサ4を用い、長尺の被測定物(加工ワーク)wを距離dずつ移動さして変位センサ4により被測定物の真直度を測定し、この測定値に含まれる装置の運動誤差誤差を差し引く校正を行うので、短い姿勢表示物体2を用いて長い被測定物の真直度を校正することができる。
(もっと読む)
球体回転装置、球体回転方法及び球体回転装置を利用した応用機
【課題】 汎用性が大で簡単な構造で球体を満遍なく回転させることができるようにする。
【解決手段】 球体1を回転自在に受持する一対のローラ3,4と、この一対のローラ3,4をそれぞれ回転駆動するサーボモータ27,28と、前記両サーボモータ27,28を制御して前記球体1の1回転中に一対のローラ3,4の角速度を高低変化させながら一方のローラ3,4が高角速度のときに他方が低角速度となるように回転させる制御手段7とを備えている。また、前記制御手段7は、一対のローラ3,4を角速度高低変化させながら回転する途中に、球体1の少なくとも1回転における高角速度の時間長さを長短変更する回動制御機能43を有している。
(もっと読む)
熱電対接触式の表面粗さ測定方法及びワークの表面状態検出装置
【課題】広範囲の測定対象物に適応でき、インプロセスで表面粗さの変化量を検出することができるワークの表面状態検出方法及び装置を提供する。
【解決手段】一つの測定用熱電対202をワーク203の被測定面に対してこれに接触させた状態で相対運動させることにより発生する当該熱電対の熱起電力の変化量を測定し、この熱起電力の変化量から、測定用熱電対202と同一のデータ採取用熱電対を当該被測定面に対する場合と同一の接触条件及び相対運動条件で表面粗さが既知の基準面に接触させた状態で相対運動させることによって予め求めた熱起電力の変化量と前記基準面の表面粗さの変化量との相関関係データΔE=β・Ry(ΔEは前記相対運動開始時から測定時までの熱起電力の変化量、βは熱電対の接触条件及び相対運動条件に応じて熱起電力と表面粗さとの関係から導かれる粗さ係数、Ryは表面粗さ)に基づいて、被測定面の表面粗さの変化量を求める。
(もっと読む)
走行路面形状測定データの処理方法
【課題】同一波長の走行路面変位が繰り返し連続する区間を効率的に管理するための、走行路面形状測定データの処理方法を提供する。
【解決手段】地点xにおける走行路面変位の測定波形f(x)を求め、この測定波形f(x)に波長λの正弦波が繰り返し現れる場合、その繰り返しを検出するために、次式(A)を用いてF(x)を算出し(Mは想定する繰り返し数であるが、処理後、前記波形F(x)の直流分を残すために、Mは偶数とする。α(N)は、ユーザーが定める係数である。)、この結果に基づいて繰り返しを考慮した、走行路形状の管理値を判定する。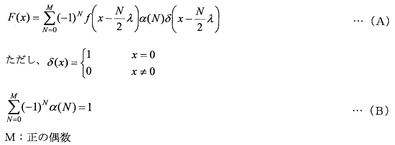 (もっと読む)
(もっと読む)
反り量測定装置、該反り量測定装置を有する浮上搬送コンベア、及び反り量測定方法
【課題】薄板Sの反り量の測定を測定するための装置(反り量測定装置47)を簡易なものにすること。
【解決手段】薄板Sを浮上させた仮想の浮上状態をシミュレーションして求められかつ薄板Sの固有の反り量と関連づけて薄板Sの板幅方向の位置と浮上量との関係を示す浮上挙動テーブルを参照しつつ、計測された薄板Sの浮上量に基づいて、薄板Sの固有の反り量を推定することにより、薄板Sの反り量を測定すること。
(もっと読む)
測定方法及び形状測定装置
【課題】センサ1本だけを用いた繰返し走査型の2点法で高い測定精度を実現する新しい測定方法及び形状測定装置を提供する。
【解決手段】回転ガイドRGの周囲を走査用回転部SRを相対回転させ、それと共にセンサS1が被測定対象OBの周囲を回転し外周の凹凸を検出するので、変位センサS1の出力が不図示のエンコーダの信号に同期して出力される。回転軸線Xの交差位置を変えずに被測定対象OBと検出部保持台BSとを走査方向に所定の角度だけ回転変位させる。回転ガイドRGの周囲を、走査用回転部SRを相対回転させるとそれと共にセンサS1が被測定対象OBの周囲を回転し、その出力を取得することで(4)ー(6)式が求められ被測定対象OBの形状だけを求める差分が得られる。
m1(θ)=f(θ)+ex(θ)(4)、m2(θ)=f(θ+φ)+ex(θ)(5)、m2(θ)−m1(θ)=f(θ+φ)−f(θ)(6)
(もっと読む)
複合表面粗さ標準片
【課題】複数の種類の校正およびチェクが容易にできる粗さ標準片を提供する。
【解決手段】複数の測定領域14、16を、1つのブランク12の表面に連続して、もしくは相互に間隔を置いて作る。測定領域14、16の溝パターンは、深さ方向には同一の振幅を有する正弦波状であり、測定方向の波長がそれぞれ2.5mm、0.8mm、0.25mm、0.08mm、0.025mmである溝パターンの内の2乃至5種類の測定領域14、16を有しているようにする。測定方向の波長が測定方向の距離に対して直線的に変化するようにしたり、対数関数の関係を有して変化するようにしてもよい。あるいは、複数の測定領域14、16は、それぞれが正弦波状、三角波状、及び円弧を連ねた溝パターンを有し、これらが実質的に平坦な領域を挟んで配置されているようにしてもよい。
(もっと読む)
11 - 20 / 236
[ Back to top ]