
国際特許分類[G01B5/004]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 機械的手段の使用によって特徴づけられた測定装置 (1,646) | 点の座標測定用 (262)
国際特許分類[G01B5/004]の下位に属する分類
座標測定機械を使うもの (250)
国際特許分類[G01B5/004]に分類される特許
1 - 10 / 12
三次元計測治具及びこれを用いた三次元計測方法
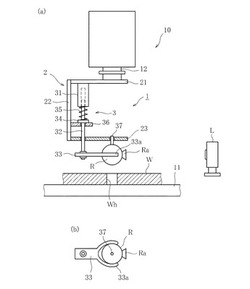
【課題】計測対象物における孔の三次元座標を正確に計測することが可能である三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】レーザ測定機LによってワークWにおける孔Whの三次元座標を得るのに用いられるリフレクタRを保持する三次元計測治具1であって、立形NCフライス盤10のスピンドル軸12に取り外し可能に装着される連結部2と、立形NCフライス盤10の動作によりワークWの孔WhにリフレクタRを相対的に接近させ、且つ、該ワークWにおける孔Whの縁にリフレクタRが接触した時点でリフレクタRを孔Whに押し付け可能なターゲット保持機構3を備えている。
(もっと読む)
無軌道式移動台車の位置検出装置及び方法

【課題】無軌道式移動台車が球面,円筒面,平面を移動する場合の位置検出装置において、無軌道式移動台車が例えば球面や円筒面を周方向に移動して位置検出装置から隠れてしまう場合であっても、位置検出が可能な位置検出装置を与えることを目的とする。
【解決手段】本体内部にワイヤを備え、前記ワイヤが牽引された量をエンコーダ値として出力する第二リニアエンコーダが取り付けられた第二保持治具を設置し、前記第二のリニアエンコーダのワイヤ先端を前記無軌道式移動台車の前記リニアエンコーダのワイヤ先端の取り付けられた位置に取り付け、前記第一のリニアエンコーダのワイヤが牽引された量と前記第二のリニアエンコーダのワイヤが牽引された量とから前記無軌道式移動台車の位置を前記演算装置にて演算すること特徴とする。
(もっと読む)
接触式振動計およびこれを備えた表面性状測定装置
【課題】検査対象物に対して測定力一定制御の応答可能帯域よりも高い周波数までの振動を測定でき、質量効果の影響を低減できる接触式振動計およびこれを備えた表面性状測定装置を提供すること。
【解決手段】接触式振動計を備えた表面性状測定装置は、検査対象物との接触時に発生する測定力を検出し力検出信号として出力する力センサ1、力センサ1を検査対象物の振動に応じて移動させる駆動アクチュエータ133、力センサ1の位置変位情報を検出し変位信号として出力するスケール検出器135を有するプローブ130と、力検出信号を力フィードバック信号として力設定値と比較し、力フィードバック信号が力設定値に一致するように駆動アクチュエータ133を駆動させる力制御ループRFと、力検出信号および変位信号を合成して、検査対象物の振動振幅を取得する信号変換器240を備える。
(もっと読む)
車体の二点の矯正座標点を計測するシステム
【課題】この種の計測システムに、本出願人が提案する発明がある。水準器を備えたゲージ棒と、ゲージ棒の両端に設けたジョイント部材で構成し、ジョイント部材に垂設した位置決めゲージと、一本〜数本の計測ゲージで構成し、計測ゲージで、車輌の歪みを計測する。一本のゲージ棒を基点として、一箇所〜二箇所の歪みを計測できるが、一本のケージ棒を介して、計測するので問題である。
【構成】車体の複数矯正座標点に支持した対の座標位置決め兼支持具と、各座標位置決め兼支持具に、垂下した各座標位置決めスケールと、各座標位置決めスケールに一端を、座標計測支持具に他端を、支持した対の本体スケールと、各本体スケールに、座標計測支持具の他端を支持する際に、スペーサを介在し、本体スケールの他端を、水平面に対して位相を変え、座標計測支持具に支持する構造である。
(もっと読む)
携帯型計測装置
携帯型計測装置のための方法及びシステムが記載される。本発明の1実施形態は、第1のリンクと、第1の自由度で移動するように動作可能な第1の連結器によって第1のリンクと連結される第1のプローブと、第2の自由度で移動するように動作可能な第2の連結器によって第1のリンクと連結される第2のプローブと、第1の連結器の動作と関係付けられる第1のセンサ信号を出力するように動作可能な第1のセンサと、第2の連結器の動作と関係付けられる第2のセンサ信号を出力するように動作可能な第2のセンサとを有する装置である。また、実施形態は、第1及び第2のセンサと連絡するプロセッサであって、第1のセンサ信号及び第2のセンサ信号を受信し、且つ少なくとも部分的に第1のセンサ信号及び第2のセンサ信号に基づいて第1のプローブと第2のプローブとの間の距離を判断するように動作可能なプロセッサを有する。  (もっと読む)
(もっと読む)
垂直直動装置
【課題】本発明の目的は、移動部とバランスウェイトの重量バランスを正確かつ容易に調整することのできる垂直直動装置を提供することにある。
【解決手段】基部12に対して垂直方向に直線移動する移動部14と、該移動部14を駆動する駆動手段16と、を備えた垂直直動装置10において、該移動部14に対向配置され、該移動部14との重量バランスをとるためのバランスウェイト18と、該移動部14と該バランスウェイト18との間を連結し、該移動部14の直線移動に同期して該バランスウェイト18を直線移動させる伝達手段20と、該バランスウェイト18の直線移動を規定の方向に導くガイド22と、該移動部14とバランスウェイト18との重量バランスがとれるように、該基部12に対し該ガイド22を角度変更自在に支持する支持手段24と、を備えたことを特徴とする垂直直動装置10。
(もっと読む)
切断機用自在軸受装置の位置調整用装置および方法
本発明は、とりわけ切断機における自在軸受装置(21)の位置調整を行う装置と方法に関する。前記切断機、ポータルロボット等における工具のいわゆるTool Center Point(TCP)と呼ばれる、工具中心点として表されるものに関しての位置調整またはキャリブレーションが、調整装置の単一の可動な測定先端で行われ、この調整装置は工具と直接的に作用結合し、ソフトウェア制御による測定方法によって、工具の最適に調整されるべき開始位置の記録を行い、この開始位置の再現性を保つことを可能とする。TCPの決定はメンテナンスおよび調整作業の後か、または工具および切断機の衝突の後で必要となる可能性がある。本発明は装置技術としては、自在軸受装置(21)の位置調整のための調整装置であり、とりわけ切断機におけるものであり、この調整装置はフレーム(1)から見て3つのリンク部材、第1のリンク部材(3)、第2のリンク部材(4)および第3のリンク部材(5)を連結したものを備え、これらのリンク部材は互いに重なって、直動関節(12、13、14)を介して前記フレーム(1)に、直交座標系の3つの全ての軸において、互いに遊び無しに、軽く(kraftfrei)動くように結合されており、ここでどの軸にも基準位置は存在せず、そして第3のリンク部材(5)は直動関節(14)を介してフレーム(1)に結合し、第2のリンク部材(4)は直動関節(13)を介して第3のリンク部材(5)に結合し、そして第1のリンク部材(3)は直動関節(12)を介して第2のリンク部材(4)に結合し、これらのリンク部材(3、4、5)は一体型で形成されており、それぞれのリンク部材は個々に生成された部品から構成されるのでなく、1個の単一の部品であり、同様にフレームから最も離れた第1のリンク部材(3)には、重力方向に反対に物理力接続(kraftschlussig)によって、その直交する面に形状接続(formschlussig)によって測定アダプタ(16)に接続された装着部(3b)を備え、ここで第1、第2および第3のリンク部材(3、4、5)には回転型の測定センサ(6、7、8)が配置されており、これらはこれらの測定センサは測定ピニオン(9、10、11)および各々のリンク部材(3、4、5)に設けられた測定ラック(3c、4a、5a)を用いて、これらの隣接するリンク部材(4、5)および前記フレーム(1)に対する相対的運動を検出し、これらの測定値は変換装置(2)で処理され、データライン(23)による変換装置(2)とコンピュータ(24)とのオンライン接続を備える。 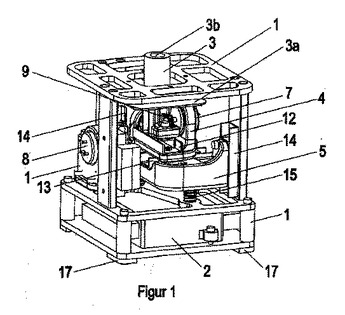 (もっと読む)
(もっと読む)
位置測定方法、変位測定方法、変位の監視方法
【課題】被測定点の3次元的な位置を正確に測定することができる測定方法を提供する。
【解決手段】原点Oで交わるように設定された互いに直交する3軸で構成される三次元座標系における被測定点O’の位置を、3軸上に夫々測定点X、点Y、点Zを設定し、各測定点X、点Y、点Zと前記被測定点O’を結ぶ線分O’X、線分O’Y、線分O’Zの長さを夫々測定し、線分O’X、線分O’Y、線分O’Zの長さに基づいて、算出する。
(もっと読む)
空間内の対象物の位置を測定かつ/または較正するための方法および装置
本発明は、空間内の対象物の位置を測定かつ/または較正する方法およびそのための装置に関し、そのような実施形態においては、装置は、一端においてフレームに嵌合され、他端においてプラットフォームに嵌合された、少なくとも1つの移動アームを含み、プラットフォームは、測定または較正される対象物に取り付けられることができ、プラットフォームを取り付けられた対象物が動いている間に、少なくとも1つの移動アームの個々の部材、フレームおよびプラットフォームの相対的な位置が読み取られ、測定されたデータは、対象物の位置を決定するために、または対象物を較正するために使用される。測定および/または較正装置のプラットフォームを測定または較正対象物に取り付けると直ちに、これらの接合された部分は、対象物の駆動装置によって起動され、対象物の作動空間の範囲内で任意の動きを行い、その一方で、装置の個々の部材の相対的な位置に対応する量が収集され、空間内の対象物の位置の決定または較正のために使用される。測定または較正対象物を有するプラットフォームが動いている間に測定された量の数は、装置の自由度の数より少なくとも1大きい。 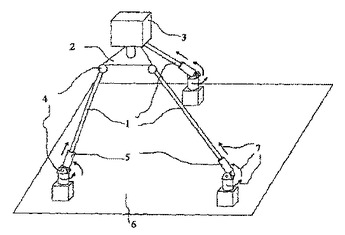 (もっと読む)
(もっと読む)
車体の自動測定システム
【課題】 自動車の組立ライン中に特別の寸法測定装置を設置することなく、車体の全数を測定して下流側工程に寸法に異常がある車体を流出させないことができる車体寸法の自動管理システムを提供する。
【解決手段】 本発明の車体寸法の自動管理システム10は、車体組立用の多関節ロボット1と、多関節ロボット1の制御装置6と、多関節ロボット1のアーム7bの先端に設けられたタッチセンサ3とを含んで構成され、下流側工程で部品が取り付けられる車体の部品取付部位Haの少なくとも2点にタッチセンサを順次接触させ、制御装置6により前記2点の各々の座標データを取得して2点間の距離の演算値を求め、演算値が予め設定した公差の範囲を外れるときは組立ラインLを一時停止する。
(もっと読む)
1 - 10 / 12
[ Back to top ]