
国際特許分類[G01C11/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 写真計量または映像計量,例.ステレオ法を用いた測量;写真測量 (242) | 写真の判読 (149) | 同一地域の2枚以上の写真の比較によるもの (117)
国際特許分類[G01C11/06]の下位に属する分類
撮影されたときと同じ相対位置に写真を支持しないもの (1)
撮影されたときと同じ相対位置に写真を支持するもの
写真上のデータを記録するために特に付設する物,例.プロフィル用
国際特許分類[G01C11/06]に分類される特許
31 - 40 / 116
地上レーザスキャナ測量装置、測量装置及び測量方法
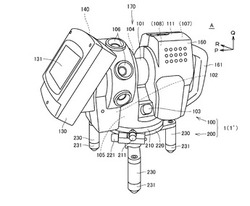
【課題】装置本体を測量現場に簡単に素早く据え付け可能にする。
【解決手段】地上レーザスキャナ測量装置Aは、レーザを計測対象物に向けて照射して水平方向及び垂直方向にスキャンニングを行い計測対象物の座標点データを取得する装置であって、装置本体1とPCとを有している。装置本体1には、傾きを測定する傾斜計102と、求心用の可視ポイントレーザ光を発する求心レーザ105と、可視ラインレーザ光を発するラインレーザ103と、ラインレーザ103とは反対向きに設けられ且つ可視ポイントレーザ光を水平に発するポイントレーザ104と、計測対象物の座標点に色を付けるためにスキャンニング範囲の画像を撮影する電子カメラ106等が備えられている。
(もっと読む)
写真測量装置及び写真測量方法

【課題】曲面状の基準面をより正確に推定することができる写真測量装置及び写真測量システムを提供する。
【解決手段】写真測量装置10は、異なる2点の撮影位置から、測定対象物の表面上に設けた複数の基準点と測定対象物の計測範囲とを含む画像を撮影する写真撮影部3と、複数の基準点を含む複数の測定点の3次元座標を得る写真計測部4と、測定点をつなぐ三角網で構成される測量表面を生成する測量平面生成部5と、測量表面について測定対象物の表面の摩耗が生じる摩耗発生方向に平行な断面との交点を結ぶ折れ線からなる断面線を生成する断面線生成部6と、交点の座標に基づく近似多項式からなる曲線状の基準線を得る多項式近似部7と、測量表面について、異なる複数の断面線について得られた近似多項式からなる複数の曲線状の基準線に基づいて、曲線状の基準線上の交点に対応する対応点を結ぶ三角網で構成される基準面を生成する基準面生成部8と、を含む。
(もっと読む)
立体マーカを利用した位置計測システム
【課題】立体マーカの位置計測において、カメラの視線が平行に近い場合であっても奥行き方向の誤差を少なくして位置を計測する。
【解決手段】2台のカメラ(A、B)201で取得した計測対象に配置した複数の立体マーカCMの画像データのうち、一方のカメラ(A)201の画像データが立体マーカCMの1面を認識し、他方のカメラ(B)の画像データが立体マーカCMの2面を認識したものであるとき、前記他方のカメラが認識する2面のそれぞれの中心座標間の中間座標を算出し、算出した中間座標と前記他方のカメラのレンズ中心とを結ぶ視線L3と、前記一方のカメラ(A)201の視線L1との交点P(測定位置)を求める。
(もっと読む)
撮影位置特定装置および撮影位置特定方法
【課題】あらかじめ用意された三次元地勢データを利用することなく、二次元平面地図上に災害現場の位置を高い精度で特定する撮影位置特定装置を提供する。
【解決手段】映像入力装置10、機体センサ部20、表示装置30、入力装置40および信号処理装置50を備え、映像入力装置10はジンバルカメラ部11およびこのカメラの角度を計測するカメラ姿勢計測部12を有し、機体センサ部20は航空機の機体の姿勢、緯度、経度および高さを計測し、表示装置30はカメラで撮影された画像を表示し、入力装置40で画像中に表示された目標物をポインタで指定し、信号処理装置50はカメラ角度と、航空機の機体の姿勢、緯度、経度および高さと、指定された目標物の表示位置に基づいて、カメラレンズの中心から目標物を通る直線を航空機の移動の前後において求め、移動前の直線と移動後の直線との距離が最小となる点の座標を計算する。
(もっと読む)
非接触三次元計測装置及び非接触三次元計測方法
【課題】表面に特徴のない物体についても高速な計測を可能にする非接触三次元計測装置及び非接触三次元計測方法を提供する。
【解決手段】被計測物1を撮影する第1のカメラ2a及び第2のカメラ2bと、被計測物1にラインレーザ12を照射するラインレーザ4と、第1のカメラ2a及び第2のカメラ2bの、互いの位置関係に関する外部標定を行う標定部6と、ラインレーザ12が照射された被計測物1を第1のカメラ2aで撮影した第1の画像と、第2のカメラ2bで撮影した第2の画像とを画像処理する画像処理部8と、を備え、画像処理部8は、第1の画像上のラインレーザ12が照射された第1線分データの中の一つの点を特徴点として選択し、第2の画像上において、ラインレーザ12が照射された第2線分データとエピポーラ線との交点を、第1の画像上で選択した特徴点と対応する対応点として決定し、被計測物1上の該当点の三次元座標を算出する。
(もっと読む)
レーザデータのフィルタリング方法及び装置
【課題】信頼性の高いレーザデータのフィルタリング方法の提供を目的とする。
【解決手段】上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・を対象とし、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7と、各画像の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデル8を生成し、
次いで、該数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出する。
(もっと読む)
自動化された三次元マッピング法
本発明は、複数の画像を利用して三次元モデルを推定する自動化された三次元マッピング法に関する。この方法は、少なくとも一つのカメラについての位置及び姿勢が、画像がとられるときに記録されること、少なくとも一つのカメラが画像における各画素の方向を示すために幾何学的に較正されること、ステレオ視差が、各ステレオ視差について視差及び確実性の程度の推定値を設定して同じ領域位置をカバーする複数の画像対について計算されること、異なるステレオ視差が一緒に重み付けされて3Dモデルを形成すること、及びステレオ視差推定値が、推定された3Dモデルに基づいて自動的にかつ適応させて再重み付けされることを特徴とする。 (もっと読む)
照明灯の三次元位置測定方法
【課題】駅構内等の天井部等に設置された多数の照明灯をカメラで撮影し、その画像に基づき多数の照明灯の各々の存在を検出し、その設置位置を三次元的に正確に測定し、照明灯の自動清掃システムを実現する照明灯の三次元位置測定方法を提供する。
【解決手段】本発明に係る照明灯の三次元位置測定方法は、測定対象となる照明灯11を検出する第1ステップS10と、検出した照明灯の三次元位置を測定する第2ステップとS20、その他の複数の照明灯について、測定対象となる照明灯が存在しなくなるまで第1ステップと第2ステップを繰り返す第3ステップS30とからなる方法である。
(もっと読む)
変位計測装置、変位計測方法、及び変位計測プログラム
【課題】地滑りのように広範囲で変位特徴点が多数となり得る変位計測において、作業効率及び精度の向上を図る。
【解決手段】観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成する(S42)。地滑り前後の地形データそれぞれから生成される起伏特徴画像についてパターンマッチングを行い、観測対象領域内に設定された変位追跡点の起伏特徴画像上での対応点を追跡する(S44)。起伏特徴画像上での対応点の位置、及び地形データの高さ情報に基づいて、変位追跡点の三次元座標を求める(S48)。各時刻での変位追跡点の三次元座標に基づいて変位追跡点の三次元変位ベクトルを求める(S50)。
(もっと読む)
3次元デジタイザ
【課題】連続性のある実画像に3次元情報を持たせ、仮想空間の任意の視点から実画像に含まれる物体を見ることが可能な画像データを生成する3次元デジタイザを提供する。
【解決手段】撮像手段2はカラー画像を撮像し、距離画像生成手段1は撮像手段2と重複する視野を持ち距離画像を生成する。撮像位置計測手段4は、撮像手段2および距離画像生成手段1による撮像位置と撮像方向とを計測する。座標変換手段3は、距離画像に規定した装置座標を位置計測手段4により計測した撮像位置および撮像方向を用いて実空間に規定されている3次元の実空間座標に変換する。座標変換手段3で得られた物体の実空間座標を用いることにより、仮想空間形成手段5では、物体のモデリングを行い仮想空間を形成する。さらに、外観形成手段6は、仮想空間に配置した物体に撮像手段で撮像した物体の外観をテクスチャとしてマッピングを行う。
(もっと読む)
31 - 40 / 116
[ Back to top ]