
国際特許分類[G01C11/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 写真計量または映像計量,例.ステレオ法を用いた測量;写真測量 (242) | 写真の判読 (149) | 同一地域の2枚以上の写真の比較によるもの (117)
国際特許分類[G01C11/06]の下位に属する分類
撮影されたときと同じ相対位置に写真を支持しないもの (1)
撮影されたときと同じ相対位置に写真を支持するもの
写真上のデータを記録するために特に付設する物,例.プロフィル用
国際特許分類[G01C11/06]に分類される特許
51 - 60 / 116
航空障害物抽出装置、航空障害物抽出方法、及びプログラム
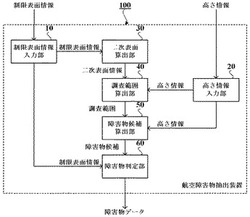
【課題】少ない作業工数で詳細に航空障害物を抽出することができる航空障害物抽出装置、航空障害物抽出方法、及びプログラムを提供する。
【解決手段】航空障害物抽出装置100は、制限表面から算出した二次表面と、DTMデータ又はDSMデータと、から調査範囲を限定し、この調査範囲内でのみ、現地測量などによる別途建造物の高さの調査や、その高さ等を示すDSMデータの高さ情報入力部20への入力が行われさえすれば、DSMデータが示す高さと制限表面とから航空障害物を判定することができる。これにより、航空障害物抽出装置100は、明らかに制限表面を侵害しない建造物の高さの現地測量などによる調査、及びその高さを示すDSMデータの高さ情報入力部20への入力を省略することが可能となるため、作業工数を削減することができるとともに、少ない作業工数でも航空障害物を詳細に抽出することができる。
(もっと読む)
計測装置、計測装置のレーザー位置姿勢値補正方法およびレーザー位置姿勢値補正プログラム

【課題】計測車両に取り付けられたレーザースキャナの取り付け位置姿勢値を調整し、精度が高い三次元点群(三次元座標の点の集合)を生成する。
【解決手段】レーザースキャナを取り付けられた計測車両は往復走行して距離方位点群283を取得する。位置姿勢標定部210は、距離方位点群283と共に取得されたGPSデータ282や姿勢角速度284に基づいて計測車両の位置姿勢を標定する。三次元点群生成部211は計測車両の位置姿勢、距離方位点群283およびレーザースキャナの取り付け位置姿勢値に基づいて三次元点群292を生成する。レーザースキャナ調整部220は、往路の三次元点群292と復路の三次元点群292とを比較し、そのずれ量に基づいてレーザースキャナの取り付け位置姿勢値を調整する。三次元点群生成部211は、調整後のレーザースキャナの取り付け位置姿勢値に基づいて正確な三次元点群292を生成する。
(もっと読む)
形状測定装置およびプログラム
【課題】重複画像における誤対応点を自動判定することで、三次元形状の測定に必要な初期値を始めとする測定値を自動で取得する。
【解決手段】
形状測定装置1は、重複撮影領域で測定対象物18を撮影する撮影部2〜9と、撮影部2〜9によって撮影された測定対象物18の特徴点の位置を対応付ける特徴点対応付部21と、特徴点対応付部21で対応付けた特徴点の重複画像における視差を求める視差測定部22と、視差測定部22で求めた視差に基づき、測定対象物18の特徴点の三次元座標を求める三次元座標演算部23と、視差測定部22で求めた視差、および、三次元座標演算部23で求めた三次元座標または三次元座標系における測定対象物18の形態に基づいて、誤対応点を判定する誤対応点判定部24と、誤対応点判定部24で誤対応点と判定された点を除いた特徴点の位置等に基づき、測定対象物18の三次元形状を求める三次元形状測定部25とを備える。
(もっと読む)
ステレオマッチング処理装置、ステレオマッチング処理方法およびプログラム
【課題】ステレオマッチング処理の速度と精度を向上する。
【解決手段】画像データ入力部10は、複数の異なる位置から所定の領域を撮影した複数の画像の画像データを取得する。基準視差設定部12は、複数の画像に対応して基準の視差を設定する。探索範囲設定部13は、基準視差設定部12で設定された基準の視差を与える画像の点を基準に、画像の範囲よりも小さい所定の範囲をステレオマッチングの探索範囲に設定する。ステレオマッチング部11は、複数の画像の一つの画像内の任意の点について、基準視差設定部12で設定された基準の視差を与える他の画像の点を基準に、探索範囲設定部13で設定された探索範囲で、他の画像の対応する点を探索する。
(もっと読む)
ステレオ画像処理装置、ステレオ画像処理方法、および、プログラム
【課題】ステレオペア画像の縦方向のずれを補正する。
【解決手段】2つの異なる位置から所定の領域を撮影した、走査線方向とエピポーラ線方向が一致するステレオペア画像の走査線方向(X方向)に平行な所定幅の画像領域について、該ステレオペア画像の一方の画像と他方の画像とで相関が高い行のペアを特定し、特定された行のペアの各位置に基づいて、ステレオ画像の一方の画像と他方の画像との間の縦方向(Y方向)のズレ(縦視差)を求め、求めたズレがなくなるように前記ステレオ画像を補正する。
(もっと読む)
建設機械
【課題】
簡便な構成で建設機械本体に対する位置、傾斜等を含む姿勢を正確に、而もリアルタイムで検出可能とした姿勢検出装置、及び該姿勢検出装置を具備した建設機械を提供する。
【解決手段】
建設機本体14と、該建設機本体に設けられた工事作業具8と、前記建設機本体の機械中心に対して既知の位置に設けられた2つのカメラ18,19と、前記工事作業具に設けられ、前記2つのカメラの視野にそれぞれ含まれる様に配置された少なくとも3のターゲット21と、前記2つのカメラで取得したステレオ画像から各画像中で共通する少なくとも3のターゲット像を抽出し、該各ターゲット像の3次元位置を求め、求めた3次元位置に基づき前記工事作業具の前記建設機本体に対する位置、姿勢を算出する演算処理装置とを具備する。
(もっと読む)
傾斜性地理的位置決め及び測定システム
【課題】捕捉された傾斜画像から表示し、地理的位置決めし、そして計測を行うコンピュータ化システムはコンピュータシステムによりアクセス可能はデータファイルを有する。そのデータファイルは、複数の捕捉された傾斜画像に対応する複数の画像ファイルと、それらの画像に対応する位置データとを有する。
【解決手段】画像表示及び解析ソフトウェアは、データファイルを読み取り、捕捉された傾斜画像の少なくとも一部を表示するシステムにより実行される。そのソフトウェアは、表示画像における1つ又はそれ以上のユーザにより選択された点についての位置データを検索し、いずれかの2つ又はそれ以上の選択された点間の離間距離を演算する。その離間距離の演算は、選択された点間の直線距離、選択された点で囲まれた面積、選択された点間の相対的仰角、選択された点間の高さ方向差分を含む種々のパラメータを決定するようにユーザにより選択可能である。
(もっと読む)
三次元画像計測システム
【課題】 計測対象を撮影して三次元座標を計測する際に、撮影位置を高精度に確保できない場所であっても、リアルタイム性に優れ、精度良く計測できる三次元画像計測システムを提供することを目的とする。
【解決手段】 移動体に搭載されて計測対象Pを撮影する撮影カメラ200と、移動体の移動に応じて、撮影カメラ200の平行ステレオ撮影を行い、撮影カメラ200の三次元座標を順次計測するカメラ制御装置100と、撮影カメラ200で撮影された計測対象Pの画像データと撮影カメラ200の三次元座標に基づいて、計測対象Pの三次元座標を生成する計測対象三次座標演算部300と、を備える。
(もっと読む)
軌道のレールの管理寸法測定方法、およびその装置
【課題】測定位置に関する情報および管理寸法をセットにして取得することによって、測定作業の省力化を十分に図り得る、軌道のレールの管理寸法測定方法、およびその装置を提供する。
【解決手段】軌道のレールの管理寸法測定装置10は、測定位置に関する情報を光学的に区別可能に示す第1の反射ターゲット21と、左右のレール51、52の測定対象部位を光学的に区別可能に示す第2と第3の反射ターゲット22、23と、第1〜第3の反射ターゲットを角度を変えてフラッシュ撮影することによって第1〜第3の反射ターゲットの像を含む複数の画像を撮影するデジタルカメラ30と、撮影した画像のデータを解析処理するコントローラ40と、を有している。コントローラは、測定位置に関する情報を識別するとともに、写真測量の原理によってふく進量dなどの管理寸法を算出し、測定位置に関する情報および管理寸法をセットにして取得する。
(もっと読む)
カメラおよび座標算出プログラム
【課題】被写体の反射率にかかわらず該被写体の位置情報を求めるカメラを提供する。
【解決手段】カメラは、共通の被写体を撮影した異なる2地点A,Bの撮影位置情報をそれぞれ取得する位置情報取得手段と、2地点A,Bにおける撮影方位情報θA、θBをそれぞれ取得する方位情報取得手段と、2地点A,Bを含む平面上で2地点A,Bから撮影方位へそれぞれ延ばした直線の交点Oが示す位置情報を算出する位置情報算出手段とを備える。
(もっと読む)
51 - 60 / 116
[ Back to top ]