
国際特許分類[G01C15/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | グループ1/00から13/00までに分類されない測量機器または付属具 (1,518)
国際特許分類[G01C15/00]の下位に属する分類
測点のマーク付のための手段 (441)
下げ振り (26)
固定角,例.直角,を設定するための器具 (1)
人工水平儀
国際特許分類[G01C15/00]に分類される特許
31 - 40 / 1,050
相対位置を地中で確認可能なシールドマシン、及び、シールドマシンの相対位置検出方法
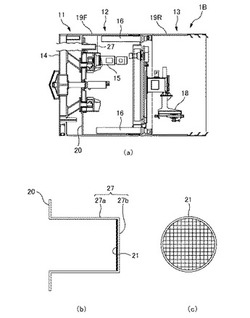
【課題】相手方シールドマシンとの相対位置を地中で確認できるようにしたシールドマシンにおいて、スケール部材の破損を防止しつつも、超音波センサを用いた構成に比べて相対位置の検出精度を高める。
【解決手段】前側スキンプレート19Fにおけるカッター14よりも後方の位置に隔壁20が設けられたシールドマシン1Bであって、隔壁20には、相手方のシールドマシンからシールドマシンの掘進方向に繰り出された小径ボーリング部を内側空間に受け入れ可能な筒状体27が設けられ、この筒状体27には、小径ボーリング部の内側空間における底面方向の位置を計測するためのセンサ板21が設けられている。
(もっと読む)
三次元点群計測方法、三次元点群計測プログラム

【課題】GPS測位演算によりFix解が得られている場合であっても、GPS衛星が元々有する測位誤差要因により測位精度の劣化が生じている。静止測量では長時間の静止によって平均的な解を求めることで精度の劣化を低減できるが、移動体測量では静止ができない、あるいは低速で走れないことが通常であるので、静止測量のように時間平均により精度劣化を抑えることができない。
【解決手段】同じ走行路を複数回走行し、各走行でのレーザ点群の結果において位置が変化しない固定物を基準点とし、基準点が重ね合わさるように点群を伸縮する。この際、位置精度の信頼度で重み付けを行い、その平均的な結果を真値として扱う。また、走行中は常にGPS衛星の状態が変化するので、一点で補正するのではなく一定間隔ごとに固定物を特定して、各走行ごとに位置補正量を算出する。
(もっと読む)
遠隔計測システム
【課題】計測対象物の位置を遠隔操作によって計測する。
【解決手段】計測対象区域外に設置した遠隔操作手段10と、搬送手段によって計測対象区域内に配置されて計測対象物の位置を遠隔操作により計測可能な遠隔トータルステーション2と、それらの間で操作信号および計測情報を伝送する通信手段11を具備する。遠隔トータルステーションによって基準点の位置を計測することにより遠隔トータルステーション自体の位置を計測する。遠隔トータルステーションを架台4に搭載してクレーンにより計測対象区域に搬送する。クレーンが備える電磁石による磁力によって架台を揚重可能とする。架台にカメラを搭載してその画像情報を通信手段により遠隔操作手段に伝送する。
(もっと読む)
長手方向に延在する構造物の展開画像作成装置及び展開画像作成方法
【課題】長手方向に延在する構造物の側壁に目地がない場合にも撮影画像から側壁の展開画像を作成できる装置及び方法を提供する。特に、トンネルの側壁や橋梁の床版・高欄部等の展開画像を作成する方法に関する。
【解決手段】長手方向に延在する構造物の側壁の展開画像作成装置は、長手方向に延在する構造物の側壁に垂直な方向から側壁を撮像して側壁の撮像画像を得る撮像装置と、撮像装置と近接して設けられ、側壁に平行な軸を回転軸として配置され、側壁に平行な軸に対する回転角について、側壁と撮像装置との距離を計測する距離計と、側壁に側壁の湾曲している断面方向に延びる仮想的な目地を仮定し、撮像画像内に仮想的な目地を投影して、投影した仮想的な目地を利用して、撮像画像から側壁の展開画像を得る画像処理部と、を備える。
(もっと読む)
測量方法
【課題】設計図等の設計データの目標位置と平面位置に関して対応する位置を、実際の面上において求める。
【解決手段】三次元位置を計測可能な測量計10は、着目位置に向けて計測用光を投光し、実際の面2Rからの反射光を受光し、当たる位置を計測位置Pkとしてその位置座標を出力するともに、出力された計測位置Pkの位置座標を、設計面2V内の平面位置を規定する平面位置座標と、設計面2Vの法線方向の位置を規定する法線位置座標とで示す。測量計10は、着目位置の平面位置座標を目標位置Paの平面位置座標に維持しつつ当該着目位置の法線位置座標を変更しながら計測用光を投光し、計測位置Pkの平面位置座標が目標位置Paの平面位置座標に一致する計測位置Pkを求める。求められた計測位置Pkの平面位置座標及び法線位置座標を、対応する位置として取得する。
(もっと読む)
施工誤差を求める方法
【課題】施工現場等において実際の面と設計面との間の施工誤差を求める。
【解決手段】設計データで規定された設計面2Vと、設計データに基づいて形成される実際の面2Rとの間の設計面2Vの法線方向の施工誤差Eを、三次元位置座標を計測可能な測量計10を用いることにより求める。測量計10から計測用光を投光し、実際の面2Rからの反射光を受光することで、当たる位置の計測位置Pkの位置座標を、設計面2V内の平面位置を規定する平面位置座標と、設計面2Vの法線方向の位置を規定する法線位置座標とで示す。計測位置Pkの平面位置座標と一致する設計面2V上の位置の位置座標を、設計データから取得する設計面位置座標取得ステップと、計測位置Pkの法線位置座標と、設計面位置座標取得ステップで取得した設計面2V上の位置の法線位置座標とに基づいて、施工誤差Eを算出する施工誤差算出ステップと、を有する。
(もっと読む)
モバイルマッピングシステム、及びこれを用いた沿道対象物の計測方法と、位置特定プログラム
【課題】本願発明の課題は、従来技術が抱える問題、すなわちレーザ距離計を用いた計測では沿道状況の変化に追随して手軽に計測できないという問題、写真計測技術を利用した場合には計測精度が劣るという問題、を解決することであり、手軽に計測できるものであって、費用のかかる計測機器も必要とせず、しかも高い位置精度を確保できる、モバイルマッピングシステム、及びこれを用いた沿道対象物の計測方法と位置特定プログラムを提供することにある。
【解決手段】本願発明のモバイルマッピングシステムは、取得画像中の沿道対象物の特徴点を指定すると該特徴点を含む画像から2つの最適画像を自動抽出し、撮像手段位置及び撮像方向と2つの最適画像に基づいて指定された特徴点の位置を特定するものであり、2枚の最適画像の撮像方位の交差角が90°又は略90°となるような組み合わせとしたものである。
(もっと読む)
鉄塔の送電線支持点間の測量方法
【課題】再帰性反射シートを使用することなく、鉄塔に作業員が登らずに、送電線が活線状態の充電線路でも送電線支持点間の水平距離と高低差を安全かつ効率的に測量できる測量方法を提供する。
【解決手段】送電線支持点A、Bの座標をそれぞれ測量により求め、求めた座標から2つの送電線支持点A、B間の水平距離Labと高低差Habを求める。まず、鉄塔1直近に定めた観測点P1の座標を測量により求め、観測点P1の座標を基準として、鉄塔1の送電線支持点Aの座標を測量により求める。次に、鉄塔2直近に定めた観測点P2の座標を観測点P1の座標を基準として測量により求め、観測点P2の座標を基準として、鉄塔2の送電線支持点Bの座標を測量により求める。そして、求めた送電線支持点A、Bの座標から幾何学計算により、2つの送電線支持点間の水平距離と高低差を求める。
(もっと読む)
コンクリート床版仕上がり高さ管理方法
【課題】道路、高速道等の建造物のためのコンクリート打設の表面高さの経時的変化を計測して管理するコンクリート床版仕上がり高さ管理方法を提供する。
【解決手段】レーザ測距機4で、打設されたコンクリート床版の表面の高さを計測し、表示器としてのディスプレイ31に、目標とする目標表面の高さと、既に打設された表面である打設表面との高さの違いを表示する。コンクリート床版の表面の仕上げの基準となる点にプリズム9を置き、コンクリート型枠3の表面をレーザ測距機4で計測するときの基準値として利用し、レーザ測距機4の基準点の計測に利用する。表示器としてのディスプレイ31は、コンクリート床版表面の目標とする高さと、既に打設された表面である打設表面との高さの違いを、その度合いに応じて識別して表示する。
(もっと読む)
移動基準点写真測量装置および方法
【課題】広範囲における連続的な写真測量が可能であり、かつ安価な移動基準点写真測量装置および方法を提供する。
【解決手段】対象物に対して移動する3つ以上の移動基準点2と、対象物に対して移動し、移動基準点2とともに対象物を写真撮影する2台以上のカメラ3と、移動基準点2の絶対座標を測定する位置測定手段4とを備える。カメラ3を移動させつつ連続的に写真撮影することにより広範囲における写真測量を行うことができる。対象物に基準点を設置する必要がなく、IMU等の高価な測定機器を設置する必要がないため、測量のコストを低くすることができる。ジャイロを使用しないため、ドリフト誤差が累積することがなく、安定した精度で測量できる。
(もっと読む)
31 - 40 / 1,050
[ Back to top ]