
国際特許分類[G01C17/32]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | 磁気コンパス (194) | 電気磁気コンパス (156) | 電子コンパス (60)
国際特許分類[G01C17/32]に分類される特許
1 - 10 / 60
方位誤差補償装置、方位誤差補償方法、方位誤差補償プログラム、誤差角度補償装置、3軸磁気センサ及びセンサモジュール
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体
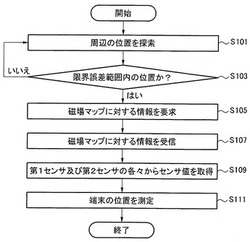
【課題】追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】本発明の磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定するステップと、を有する。
(もっと読む)
情報表示装置

【課題】表示画像の制御に関わる処理の複雑化を抑えつつ、地図や文字等の画像を可動機構の作動状態に応じた適切な状態で表示部に表示させることができる情報表示装置を提供する。
【解決手段】方位検出部158における方位検出の基準方向が、可動機構103を介して連結された第1の筐体101および第2の筐体102のうち、表示部104が保持された第2の筐体102ではなく、第1の筐体101上に設定される。操作スタイルの変更により、第1の筐体101および第2の筐体102の位置関係が変化して、使用者に対する表示画面104の方向が変化すると、開閉検出部153において検出される可動機構103の作動状態(オープン状態またはクローズ状態)に応じて、表示画像に所定の回転処理が施され、操作スタイルに応じた適切な方向を向くように画像表示が制御される。
(もっと読む)
方位情報取得方法
【課題】GPS衛星より送信される信号によりGPS受信機により方位情報を取得する方法に関して装置の使用文脈に適した廉価で効率的な方法で回折波の影響を弱化して正確な情報を得ることを可能にする。
【解決手段】体躯を用いて上空半天球の片側に存在するGPS衛星からの衛星信号の遮蔽を行うと同時に、体躯に沿い大地に垂直に設置されたGPS受信機に
他方の片側に存在するGPS衛星の衛星信号の探索を行わせつつ、捕捉した衛星信号を用いて方位を限定的に得る過程において、遮蔽物としての体躯の両脇からの回折波については、中空構造の容器中に充填された水又はそれに近い誘電損係数を備える物質を、前記GPS受信機の周囲に配備することで、廉価なGPS受信機を流用しているため影響を与えようとする回折波の弱化を効率的かつ必然性を有して所持している物質の有効活用を図りつつ実現し、GPS受信機が回折波の影響を排除し方位限定する事を助ける。
(もっと読む)
3軸電子コンパスを用いた方位測定方法および方位測定装置
【課題】3軸電子コンパスとこれを搭載した撮影装置の姿勢にかかわらず、撮影装置の特定方向、例えば撮影装置の撮影光学系の撮影光軸の方位を正確に測定できる3軸電子コンパスを用いた方位測定方法を得る。
【解決手段】3軸電子コンパスと、この3軸電子コンパスの傾斜を検出する傾斜センサとを用いて3軸電子コンパスに対する特定方向の方位を測定する方位測定方法であって、特定方向と水平面の成す仰角を傾斜センサから取得して、取得した仰角に応じて、3軸電子コンパスから得られる3つの出力値のうち、選択する2つの出力値を切り換える段階と、切り換えられた2つの出力値により地磁気の方位を取得する段階と、傾斜センサから特定方向回りの回転角を取得する段階と、取得した仰角、地磁気の方位、及び回転角に基づいて、切り換えによって発生する特定方向の方位のずれ角を算出する段階と、算出したずれ角により特定方向の方位を補正する段階とを有する。
(もっと読む)
地磁気測定装置、地磁気測定方法および地磁気測定プログラム
【課題】正確な地磁気の値を検出する。
【解決手段】携帯電話機1は、初期値生成モジュール110と非線形カルマンフィルタモジュール120とを備える地磁気測定プログラム100を格納したROM30、地磁気検出部70、加速度検出部80、及び角速度検出部90を備える。非線形カルマンフィルタモジュール120は、非線形カルマンフィルタKFの演算を実行して、地磁気の強さrを表すための第1変数ρと、地磁気の伏角θを表すための第2変数ηとを要素として含む状態ベクトルxkを推定する。
(もっと読む)
タブレット型端末用アプリケーションプログラム
【課題】傾斜角と方位角を同時に測定する機器として市販のタブレット型端末を動作させると共に2軸方向の傾斜状態の変化を動画像で画面上に表示させることが可能なアプリケーションプログラムを提供する。
【解決手段】端末本体の傾斜及び方位を検出可能なセンサを搭載したタブレット型端末で実行されるプログラムにおいて、タブレット型端末の筐体底面の縦方向をY軸、横方向をX軸として、センサの検出データに基づいて端末本体の傾斜状態を模式的に示す画像で且つY軸の傾斜角の変化に応じて変化する第1動画像を生成し画面上に表示する手段と、センサの検出データに基づいてX軸の傾斜状態を模式的に示す画像で且つX軸の傾斜角の変化に応じて変化する第2動画像を生成し画面上に表示する手段と、センサの検出データを基に求めたY軸の傾斜角とX軸の傾斜角とY軸の方位とを測定データとして出力する測定データ出力手段と、してコンピュータを機能させる。
(もっと読む)
自律測位に用いる重力ベクトルを補正する携帯装置、プログラム及び方法
【課題】自律測位機能を有する携帯装置について、その装置を保持する態様の個人差に関係なく、重力ベクトルを補正する携帯装置、プログラム及び方法を提供する。
【解決手段】地磁気センサから出力された所定期間内の複数の地磁気データを蓄積する地磁気バッファ手段と、自律測位手段から出力された所定期間内の複数の推定方位角dを蓄積する推定方位角バッファ手段と、推定方位角バッファ手段に蓄積された複数の推定方位角dが、一様分布であるか否かを判定する方位角分布検定手段と、方位角分布検定手段によって一様分布であると判定された際に、地磁気バッファ手段に蓄積された地磁気データから、その円錐の中心軸となる重力ベクトルを算出し、該重力ベクトルを自律測位手段へ出力する重力ベクトル算出手段とを有する。これによって、自律測位手段は、重力ベクトル算出手段から入力した重力ベクトルを用いて、推定方位角dを補正する。
(もっと読む)
電子時計
【課題】
複雑な制御を行うことなく計測指示から最短のタイミングで方位計測を実施できる方位計測機能付き電子時計を提供する。
【解決手段】
電子時計1は、ステップモータ2の駆動による磁界の影響を排除するために、磁界センサ4とモータ駆動仕様設定手段12と磁界計測手段14と磁界計測周期設定手段15とキャンセルデータ数設定手段16と方位計測処理手段17と統括手段18を備え、ステップモータ2の駆動パルスと磁界計測タイミングが重なると予想される数だけ、測定したデータの中からデータを排除する。
(もっと読む)
携帯機器及び携帯機器において実行されるトレーニング制御方法
【課題】 健康管理に応用可能な、携帯機器及び携帯機器において実行されるトレーニング制御方法を提供することを目的としている。
【解決手段】 処理部20は、方位演算部18より求められる現在方位とトレーニングプログラムにより設定される設定方位とを比較し、現在方位と設定方位とが所定範囲内で一致しているかを判断する第1の処理をおこない、現在方位と設定方位とが一致するまでに要した時間を算出し、判定または評価する第2の処理をおこない、第1の処理と第2の処理とに基づく処理結果を表示部22に表示する、ことを特徴とする。
(もっと読む)
1 - 10 / 60
[ Back to top ]