
国際特許分類[G01C17/38]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | コンパス;航行もしくは測量のために真北または磁北を探知する装置 (352) | コンパスの試験,較正,または補償 (153)
国際特許分類[G01C17/38]に分類される特許
1 - 10 / 153
方位誤差補償装置、方位誤差補償方法、方位誤差補償プログラム、誤差角度補償装置、3軸磁気センサ及びセンサモジュール
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
慣性航法演算方法及び慣性航法演算装置
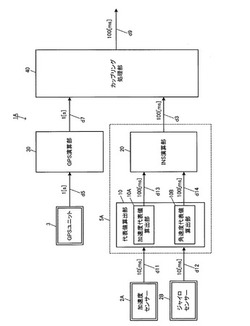
【課題】慣性航法演算によって正確性の高い位置を算出するための新しい手法の提案。
【解決手段】第1演算システム1Aにおいて、運動に係る物理量を検出するセンサーとして、加速度センサー2A及びジャイロセンサー2Bの計測結果を用いて、INS演算部20が慣性航法演算を行う。この際、代表値算出部10は、所定の時間間隔毎に到来する時刻を跨ぎ、互いに時間的に重なり合うように設定される対象期間毎に、当該対象期間内に計測された計測結果の変動に基づいて算出方法を変更して計測結果を統計演算処理する。そして、INS演算部20が、代表値算出部10による統計演算処理の結果を用いて慣性航法演算を行う。
(もっと読む)
船首方位補正装置、船首方位補正プログラム、及び船首方位補正方法

【課題】船首方位センサの出力方位を自動かつ高精度に補正する船首方位補正装置を提供する。
【解決手段】船首方位補正装置は、出力方位取得部と、対地針路取得部と、補正部と、を備える。前記出力方位取得部は、船首方位センサが出力する方位である出力方位を取得する。前記対地針路取得部は、GNSSセンサの検出結果に基づいて得られる対地針路を取得する。前記補正部は、前記出力方位と前記対地針路との差に基づいて、当該差を小さくするように前記出力方位を補正する。
(もっと読む)
磁気測定データ校正装置及び方位角計測装置
【課題】環境オフセットの変動に対する追従性を向上させる磁気測定データ校正装置及び方位角計測装置を提供する。
【解決手段】本発明は、互いに直交する3つの測定軸を有し、測定軸方向の地磁気を測定する軸センサからなる磁気センサから出力される測定軸毎の磁気測定データのオフセットを求め、磁気測定データを補正する装置であり、測定された磁気測定データの測定軸毎の磁気データと、前回のオフセットとの差分から誤差関数を求める誤差関数計算部と、誤差関数及び前回の共分散行列からオフセット残差を算出するオフセット残差計算部と、前回の磁気測定データの測定時のオフセットに対し、オフセット残差を加算し、新たなオフセットを算出するオフセット更新部と、測定された磁気測定データを用い、以前に測定された磁気測定データを母集団とする磁気測定データの共分散行列を更新する共分散行列更新部とを備える。
(もっと読む)
地磁気測定装置、地磁気測定方法、及び地磁気測定プログラム
【課題】ソフトアイアン効果が生じている場合に正確な地磁気の方向を算出する
【解決手段】機器1は、内部磁界Bi及び着磁磁界Bmを発生させる部品と、3次元磁気センサ60と、CPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データq1〜qNの示す座標が、最適中心点cEOPを中心とする楕円面近傍に分布すると仮定して、当該楕円面上の座標を、最適中心点cEOPを中心とする球面上の座標へと変換する最適楕円面補正行列TOPを、対称行列である変数行列Tの各成分を変数とする楕円面最適化関数fEL(T,c)を最小化することにより算出する。そして、磁気データqiの示す座標を、最適楕円面補正行列TOP及び最適中心点cEOPの示す座標を用いて、変換後磁気データsiの示す座標に変換し、変換後磁気データsiの示す座標と最適中心点cEOPの示す座標に基づいて地磁気Bgの向きを算出する。
(もっと読む)
電子機器および撮像装置
【課題】電子機器の内部で発生する磁気の乱れによって、検出する方位の精度が低下することを防止する。
【解決手段】地磁気に応じた磁気方位データを所定時間ごとに取得する地磁気検出部と、磁気方位データの変化量を算出する変化量算出部と、磁気方位データを記憶する記憶部と、角加速度検出部によって取得される角速度を積分して角度データを算出する積分部とを備える。磁気方位データおよび角速度が閾値の範囲内である場合は、磁気方位データを出力方位データとして採用する。変化量および角速度の一方が閾値の範囲外である場合は、閾値の範囲外となった時点を零の基準時点として角速度積分部により算出された角度を用いる。変化量および角速度が閾値の範囲内である場合に記憶された最も新しい地磁気データに対してこの角度を加算したものを出力方位として採用する。
(もっと読む)
地磁気測定装置
【課題】ソフトアイアン効果が生じている場合に正確な地磁気の方向を算出する
【解決手段】地磁気測定装置は、3次元磁気センサ60から順次出力される複数の磁気データq1〜qNの示す座標を近傍に有する、第1楕円面、第2楕円面、及び第3楕円面の形状を表す、第1楕円面係数行列Dxx、第2楕円面係数行列Dyy、及び第3楕円面係数行列Dzzを生成する初期楕円面生成部310と、第1楕円面の中心点cxx、第2楕円面の中心点cyy、及び第3楕円面の中心点czzの相互間の距離が、第1閾値Δc以下であることを判定する初期楕円面中心点判定部322と、第1楕円面係数行列Dxx、第2楕円面係数行列Dyy、及び第3楕円面係数行列Dzzに基づいて初期楕円面補正行列T0を生成するとともに、中心点cxx、中心点cyy、及び中心点czzに基づいて初期中心点cE0を生成する初期補正値生成部330とを備える。
(もっと読む)
携帯機器
【課題】携帯機器の方位や、軌跡データを生成する技術を提供する。
【解決手段】3軸の加速度センサ12は、その3軸が地磁気センサ14の3軸と平行となるように配置される。信号処理部20は、地磁気センサ14の出力S1と、加速度センサ12の出力S2を受ける。信号処理部20は、加速度センサ12の3軸出力のうち、最も大きな成分を有する軸を鉛直軸と判定し、それ以外の2軸と対応する地磁気センサ14の2軸の出力を利用して、本携帯機器1の方位を算出するように構成される。
(もっと読む)
地磁気測定装置、オフセット決定方法、及びオフセット決定プログラム
【課題】外部磁界の影響の程度を評価してオフセット値の採否を決定する。
【解決手段】機器1は、内部磁界Biを発生させる部品と、3次元磁気センサ60と、CPU10とを備える。CPU10は、3次元磁気センサ60から順次出力される複数の磁気データqiで示される座標の分布の3次元的な広がりの程度を示す分散評価値を算出し、複数の磁気データqiで示される座標が内部磁界Biの成分を示す座標を中心点とする球面Sの近傍に確率的に分布すると仮定して、球面Sの中心点x0を算出し、複数の磁気データqiで示される座標が、球面S2を歪ませた形状の立体SDの表面近傍に確率的に分布すると仮定して算出される立体SDと球面S2との形状の相違の程度を示す歪評価値gD(E)が、歪許容値δ0以下である場合に、中心点x0を3次元磁気センサ60のオフセットとして採用する。
(もっと読む)
携帯機器
【課題】磁気センサのオフセット値を精度よく算出することのできる携帯機器を提供する。
【解決手段】磁気センサと、当該磁気センサとは独立に当該携帯機器の姿勢を検出する姿勢検出センサとを備え、姿勢検出センサにより当該携帯機器が互いに異なる向きを向いていると判定される複数の状態のそれぞれにおいて、磁気センサの出力データをサンプリングデータとして取得し、取得した複数のサンプリングデータに基づいて、磁気センサが地磁気を検出しない場合に出力すると推定されるオフセット値を算出する携帯機器である。
(もっと読む)
1 - 10 / 153
[ Back to top ]