
国際特許分類[G01C21/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 速度または加速度の測定を使用するもの (157) | 航行体上で実施するもの;推測航法 (121) | 加速度または速度の積分によるもの,すなわち慣性航行 (68)
国際特許分類[G01C21/16]の下位に属する分類
国際特許分類[G01C21/16]に分類される特許
1 - 10 / 59
移動端末及び位置推定方法並びにコンピュータ読出可能記録媒体
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
姿勢角演算装置、姿勢角演算方法、及びプログラム
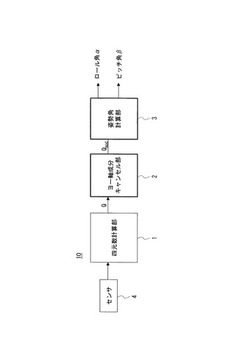
【課題】高速で姿勢角度を算出すること。
【解決手段】姿勢角演算装置は、移動体の状態量を検出する状態検出手段と、状態検出手段により検出された移動体の状態量に基づいて、移動体の姿勢を示す四元数を算出する四元数算出手段と、四元数算出手段により算出された四元数におけるヨー軸成分をキャンセルして四元数の修正を行った修正四元数(Qmod=w+xi+yj+zk)を算出する修正手段と、修正手段により算出された修正四元数に基づいて、近似式を用いて移動体のロール角α及びピッチ角βを高速に算出する姿勢角計算手段と、を備えている。
(もっと読む)
状態推定装置

【課題】高速且つ処理負荷の小さな非線形カルマンフィルタの演算を実現する。
【解決手段】状態推定装置は、3次元磁気センサ70を含む複数のセンサと、システムの状態を表す複数の状態変数を要素とする状態ベクトルxk及び複数のセンサからの出力値を要素とする観測値ベクトルykを用いて状態ベクトルxkを更新することによりシステムの状態を推定する複数のカルマンフィルタKFと、互いに異なる複数の初期ベクトルINIを生成し、状態ベクトルxkの初期値として複数のカルマンフィルタKFの各々に供給する初期値生成部200と、複数のカルマンフィルタKFの推定精度を各々評価することで、推定精度が最も高いカルマンフィルタを特定し、特定したカルマンフィルタKFを除く他のカルマンフィルタKFの動作を停止させるカルマンフィルタ制御部400とを備える。
(もっと読む)
状態推定装置、電子機器及びプログラム
【課題】 カルマンフィルターの内部状態変数と観測量の補正処理により、推定精度を維持することができる状態推定装置の提供。
【解決手段】 状態推定装置100は、観測信号に基づきシステムの内部状態をカルマンフィルターにより推定する状態推定部180と、観測信号を観測量に変換する信号変換部120と、観測量の補正処理を行う補正部160と、補正部160と状態推定部180を制御する制御部140とを含む。制御部140は、所定の補正条件が成立したと判断する場合、又は所定の補正条件が成立した旨を通知された場合に、補正部160及び状態推定部180に補正指示を行う。補正部160は、補正指示が行われた場合に、観測量の補正処理を行う。状態推定部180は、補正指示が行われた場合に、観測量に対応する内部状態変数の補正処理を行い、補正後の観測量と内部状態変数とに基づき状態推定を行う。
(もっと読む)
慣性センサ,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法
【課題】軽量,小型および安価であって、低精度なセンサ群とカルマンフィルタを組み合わせることにより姿勢情報の計算にあたって四元数を用い、センサの観測値から計算する修正量も四元数とすることにより高精度で移動体の姿勢誤差を推定し、十分な精度で移動体の姿勢を推定することができるジャイロ,加速度計,磁気センサおよび速度計を用いた移動体の姿勢推定装置および姿勢推定方法を提供する。
【解決手段】航空機にジャイロ装置11,加速度計12,磁気センサ14および速度計13を搭載する。演算器15,カルマンフィルタ19でこれらセンサに基づいた演算を行い、航空機の姿勢情報を計算する。姿勢情報の計算には四元数を用い、観測値から計算する修正量も四元数とすることにより、これを計算値に乗じることにより正確な姿勢を推定する姿勢推定装置を実現する。
(もっと読む)
姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラム
【課題】3次元の姿勢角を求めるための計算を効率よく行うことができ、演算時間を短縮でき、かつ演算速度を向上することができる姿勢推定装置及び方法、姿勢制御装置及び方法、並びにプログラムを提供する。
【解決手段】姿勢制御装置は、状態フィードバックを用いて移動体の姿勢の推定を行う。この姿勢制御装置は、姿勢及び姿勢変化率が入力され、これらを四元数に変換する入力部101と、四元数に変換された姿勢及び姿勢変化率を使用してフィルタ演算するフィルタ演算部102と、フィルタ演算により得られた姿勢に基づき移動体の姿勢制御を行う姿勢制御部104とを有し、フィルタ演算部102は、姿勢の推定を行うためのフィルタ演算に球面線形補間を使用する。
(もっと読む)
運動センサを動作させる電力効率の高い方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
姿勢情報算出装置、姿勢情報算出システム、姿勢情報算出方法及び姿勢情報算出プログラム
【課題】簡易な構成でありながら、位置の発散を抑制して仮想3次元空間における姿勢を適切に算出することができる姿勢情報算出装置、姿勢情報算出システム、姿勢情報算出方法及び姿勢情報算出プログラムを提供する。
【解決手段】センサー情報取得部210は、3つの角速度センサーがそれぞれ検出する3軸回りの角速度情報(GX、GY、GZ)と3つの加速度センサーがそれぞれ検出する3軸方向の加速度情報(AX、AY、AZ)を取得する。姿勢情報算出部220は、角速度情報(GX、GY、GZ)と加速度情報(AX、AY、AZ)に基づいて、仮想3次元空間における姿勢角と位置座標を算出する。特に、姿勢情報算出部220は、加速度情報(AX、AY、AZ)から得られる慣性座標系加速度ベクトル(A)に基づいて固定座標系速度ベクトルを算出し、当該固定座標系速度ベクトルに対応づけて仮想3次元空間における位置座標を算出する。
(もっと読む)
地磁気センサ及び加速度センサを用いて歩行者の進行方向を決定する携帯端末、プログラム及び方法
【課題】端末の姿勢が大凡一定となるように所持された携帯端末について、加速度センサ及び地磁気センサを用いて歩行者の進行方向を正確に決定する携帯端末等を提供する。
【解決手段】加速度データから、鉛直方向加速度を算出する鉛直方向加速度算出手段と、鉛直方向上向き加速度の極大点を歩行タイミングとして検出する歩行タイミング検出手段と、加速度データ及び地磁気データを用いて、鉛直方向加速度に直交する水平方向加速度を算出する水平方向加速度算出手段と、歩行タイミングに基づいて、1歩分の水平方向加速度に区分する歩毎加速度区分手段と、主成分分析を用いて、1歩分の水平方向加速度から、歩毎方向を算出する歩毎方向算出手段と、歩毎方向を、奇数歩目又は偶数歩目に交互に分類する歩毎方向分類手段と、奇数歩目の歩毎方向と偶数歩目の歩毎方向との二等分線の方向を、進行方向として算出する進行方向算出手段とを有する。
(もっと読む)
歩行計測装置、歩行計測方法およびプログラム
【課題】 歩行体の左右の歩行動作に非対称性があっても、正確な移動方向の計測が可能な歩行計測装置、歩行計測方法およびプログラムを提供する。
【解決手段】 歩行体に保持されて移動方向に関する物理量を検出する検出手段(ステップS1)と、この検出手段の検出により得られる前記物理量を表わす検出データのうち、左足を踏み出す歩行動作の際に得られる検出データと、右足を踏み出す歩行動作の際に得られる検出データとの何れか又は両方を、左右の歩行動作の大きさの違いに基づく前記検出データの差異を均衡させる方向に補正する補正手段(S9〜S11)と、この補正手段により補正された前記検出データに基づいて前記歩行体の移動方向を算出する移動方向算出手段(S12,S13)とを備えている。
(もっと読む)
1 - 10 / 59
[ Back to top ]