
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
11 - 20 / 275
位置標定装置、車載器、位置標定方法、位置標定プログラム、運転支援方法、運転支援プログラム、道路課金方法、道路課金プログラム、位置標定システム、運転支援システムおよび道路課金システム
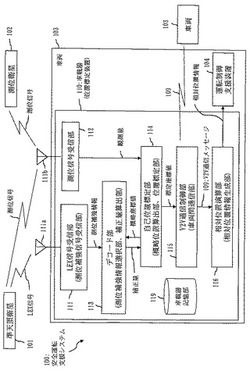
【課題】車両間で相対DGPSを行わなくても車両間の相対位置が得られるようにすることを目的とする。
【解決手段】測位信号受信部112は測位衛星102から測位信号を受信して観測量を算出する。自己位置標定部114は観測量を用いて概略位置の座標値を算出する。LEX信号受信部111は準天頂衛星からLEX信号を受信して地域別の測位補強情報を取得する。デコード部113は概略位置を含んだ地域の測位補強情報を選択して観測量の補正量を算出する。自己位置標定部114は観測量を補正し、補正した観測量を用いて標定座標値を算出する。V2V通信制御部115は標定座標値を他の車両103へ送信し、他の車両103の標定座標値を受信する。相対位置演算部116は自己の車両103と他の車両103の標定座標値に基づいて他の車両103の相対位置を算出し、算出した相対位置を運転制御支援装置104に出力する。
(もっと読む)
情報処理装置、受信情報サーバ、情報処理方法、プログラム、及び記録媒体

【課題】測位する場所毎に、より適切な動作条件を用いることによって消費電力を低減することができる測位装置を提供する。
【解決手段】情報処理装置は、測位衛星から受信する測位信号に基づいて測位する衛星測位部と、現在地に固有な環境情報を取得する環境情報取得部と、上記環境情報に基づいて、上記現在地における上記測位信号の状態を示す受信情報を取得する受信情報取得部と、上記受信情報に基づいて、上記衛星測位部の動作条件を設定する動作条件設定部と、を有する。
(もっと読む)
車両用走行支援装置
【課題】 交差点での対向車線へのはみ出しやガードレール等への接触を抑制できる車両用走行支援装置を提供する。
【解決手段】 自車前方の目標走行ラインL*上に前方注視点P*を設定し、自車が設定した前方注視点P*を走行するように車両の走行を支援する車両用走行支援装置において、自車前方の交差点形状を認識する交差点形状認識部11と、自車の進行方向を検出する進行方向検出部15と、自車の進行方向に基づいて交差点の進行先走行路を決定し、進行先走行路の入口を形成する両端PL,PRを結ぶ第1の直線LL-Rと目標走行ラインL*との交点よりも交差点内側の位置に、進行先走行路に対する前方注視点P*を設定する前方注視点設定部14と、自車が前方注視点P*を走行するように左右前輪1L,1Rを転舵する操舵制御部16と、を備えた。
(もっと読む)
密結合GPSおよび推測航法車両航法用のロードマップ・フィードバック・サーバ
【課題】車両における全地球測位システム受信機および推測航法の密結合の組合せを無線ネットワーク・サーバによって行い、実用的なロードマップ補正フィードバックを実現する。
【解決手段】ロードマップ・フィードバックは、車両レンジおよび方向を演算するために、車両のCANbusネットワーク上の車輪速度トランスデューサのデータを収集する密結合GPSおよび推測航法システムにおいて使用される。ネットワーク・サーバによって提供される道路セグメント情報は、補正可能なフィードバックを導出することができるように、現在の航法解にテンプレートされた制約をデータベースに提供する。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解のギャップを埋める。ロードマップの適合は、長い推測航法単独の動作の期間に蓄積されるドリフトを制御する。
(もっと読む)
移動軌跡補間装置、移動軌跡補間方法、及びプログラム
【課題】移動軌跡の補間点の精度を向上させること。
【解決手段】移動軌跡補間装置は、第一の時刻と前記第一の時刻における移動体の位置を示す第一の位置情報と、第二の時刻と前記第二の時刻における前記移動体の位置を示す第二の位置情報とを記憶する第一の記憶部と、時刻と、該時刻における前記移動体の速度とを記憶する第二の記憶部と、前記第二の記憶部が記憶する時刻と速度との関係に基づいて、前記第一の時刻と前記第二の時刻との間の第三の時刻に関して、前記第一の時刻からの第一の移動距離と、前記第二の時刻までの第二の移動距離とを算出する算出部と、前記第一の位置情報が示す位置を中心とし、前記第一の移動距離を半径とする円と、前記第二の位置情報が示す位置を中心とし、前記第二の移動距離を半径とする円との交点のうちの一つを補間点として判定する判定部とを有する。
(もっと読む)
ナビゲーション装置
【課題】屋内送信機から送信された位置情報を受信した際にも、精度良くユーザーに違和感の少ない現在位置を表示できるナビゲーション装置を提供する。
【解決手段】GPS受信機1が算出した位置がGPS衛星を受信して算出した位置なのか、屋内送信機から送信される位置情報を受信したのか判定するGPS種別判定部21と、GPS受信機1からの位置情報および方位検出装置3で算出される方位と、速度検出装置4で算出される速度と、記憶装置5で記憶される地図データベースを用いて位置を決定する測位部23と、屋内送信機から送信される位置情報について、その位置情報が示す場所を走行した時刻を推定する屋内位置推定部22を備え、測位部23は該推定された時刻および屋内送信機から受信した位置情報を用いて決定した位置を補正する。
(もっと読む)
情報処理装置及び情報処理プログラム
【課題】複数の対象者が集合している場所である集合場所の位置に基づいて対象者の位置を補正するようにした情報処理装置を提供する。
【解決手段】情報処理装置の解析手段は、行動情報に基づいて、対象者の位置を少なくとも含む状態を解析し、集合場所決定手段は、前記解析手段によって解析された状態、行動情報内の対象者の位置情報又は方向情報に基づいて、複数の対象者が集合している場所である集合場所の位置を決定し、補正手段は、集合場所の位置に基づいて、対象者の位置情報を補正する。
(もっと読む)
ナビゲーションシステム
【課題】携帯端末装置において車両位置検出および周辺地図描画を行って車載装置に地図表示を行う際に車両位置検出不能時に車両位置を更新することができるナビゲーションシステムを提供すること。
【解決手段】車載装置50と携帯端末装置10とが互いに接続され、携帯端末装置10において車両位置が検出されて車両位置周辺の地図画像が車両位置画像とともに描画され、この地図画像の描画データが車載装置50に送られて車載装置50において車両位置周辺の地図画像表示が行われる。車載装置50では、車両位置検出部54によって車両の位置が検出され、走行位置マーク描画部114によって、携帯端末装置10における車両位置検出が不能になったときに、車両位置検出部54によって検出された車両位置に対応する走行位置マークを地図画像に重ねて描画する処理が行われる。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術を実現する。
【解決手段】道路情報RDを取得する道路情報取得部23bと、地物が配置された道路区間である地物配置区間に推定自車位置EPが進入する前に、少なくとも道路情報RDに基づいて、地物配置区間内での自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部27と、地物情報FTと予測速度推移とに基づいて、地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部26と、画像認識処理において認識対象とする地物を認識率に基づき決定する認識対象決定部25と、を備える。
(もっと読む)
ナビゲーションシステム
【課題】携帯端末装置において車両位置検出および周辺地図描画を行って車載装置に地図表示を行う際に車両位置検出不能時に車両位置を更新することができるナビゲーションシステムを提供すること。
【解決手段】車載装置50と携帯端末装置10とが互いに接続され、携帯端末装置10において車両位置が検出されて車両位置周辺の地図画像が車両位置画像とともに描画され、この地図画像の描画データが車載装置50に送られて車載装置50において車両位置周辺の地図画像表示が行われる。車載装置50では、車両位置検出部54によって車両の位置が検出され、スクロール・回転指示部119によって、携帯端末装置10における車両位置検出が不能になったときに、車両位置検出部54によって検出された車両位置に対応する移動量の表示スクロール指示を携帯端末装置10に送るとともに、走行位置マーク描画部114によって、スクロール後の地図画像に走行位置マークを重ねて描画する処理が行われる。
(もっと読む)
11 - 20 / 275
[ Back to top ]