
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
31 - 40 / 275
経路特定のための方法及び装置
【課題】移動デバイスが移動した経路を特定する。
【解決手段】本方法は、ある移動デバイスの複数の位置測定値に基づいて、該移動デバイスが移動した経路を特定する方法である。各位置測定値には、その測定値が生成された測定時刻と、対応する測定精度とが関連付けられている。本方法は、a)前記複数の位置測定値の中から、前記経路の起点として1つ、前記経路の終点として1つの計2つの位置測定値を選択するステップと、b)前記位置測定値の中から、前記経路の第3の地点の候補として、その測定時刻が、選択された前記起点と選択された前記終点との間に存在するある位置測定値を選択するステップであって、前記候補の選択は、測定精度のより高い位置測定値が、測定精度のより低い位置測定値よりも優先されるように行われる、ステップと、c)前記候補についての測定された座標を補正するステップであって、該座標を前記起点と前記終点とを繋ぐ線に向かって移動させて、前記候補についての補正された座標を得る、ステップと、d)補正された座標を前記経路における実際の前記第3の地点として選択するステップとを含む。
(もっと読む)
測位装置、観測装置、測位方法およびプログラム
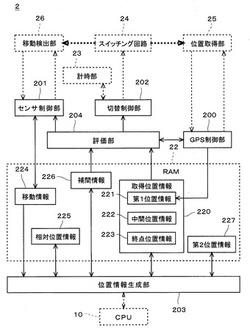
【課題】精度よく位置を取得する技術を提供する。
【解決手段】デジタルカメラ1に搭載される測位部2に、取得時におけるデジタルカメラの位置を示す第1位置情報221を取得する位置取得部25と、デジタルカメラの移動ベクトルに関する移動情報224を取得する移動検出部26と、位置取得部25により取得された第1位置情報221の精度を評価する評価部204と、評価部204による評価結果に応じて、位置取得部25により取得された第1位置情報221と移動検出部26により取得された移動情報224とに基づいて、デジタルカメラの位置を示す第2位置情報227を生成する位置情報生成部203とを設ける。
(もっと読む)
走行軌跡記憶装置

【課題】車両の絶対軌跡をより正確に生成する。
【解決手段】カーナビゲーション装置10は、修正測位軌跡生成処理部26によって、測位軌跡生成処理部22が生成した測位軌跡を修正した修正測位軌跡を生成し、修正推測航法軌跡生成処理部27によって、推測航法軌跡生成処理部25が生成した推測航法軌跡を修正した修正推測航法軌跡を生成し、絶対軌跡生成処理部28によって、修正測位軌跡生成処理部26が生成した修正測位軌跡と修正推測航法軌跡生成処理部27が生成した修正推測航法軌跡とを合成した絶対軌跡を生成し、この絶対軌跡を記憶する。
(もっと読む)
磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体
【課題】追加的なインフラの設置なしに端末の位置及び移動方向を測定することができる磁場を利用した端末の位置測定方法及び装置並びにコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】本発明の磁場を利用した端末の位置測定方法は、端末が位置する領域の磁場マップを受信するステップと、端末に含まれて第1情報及び第2情報を各々検出する第1センサ及び第2センサの各々から検出された値を受信するステップと、磁場マップ、第1センサによって検出された第1情報、及び第2センサによって検出された第2情報に基づいて端末の位置を測定するステップと、を有する。
(もっと読む)
加速度センサのゼロ点検出装置、ゼロ点検出方法、および、プログラム
【課題】加速度センサに作用する加速度がゼロとなった状態の感応軸毎の検出値を精度よく求めることを可能にする。
【解決手段】加速度検出装置は、車両が停止状態であると判定されたとき、加速度センサ111で検出された感応軸毎の検出値と、加速度センサ111の感応軸毎のゼロ点との、感応軸毎の差分から構成される合成ベクトルの大きさが、重力加速度と等しくなることを利用した方程式を最小二乗法、或いは、逐次最小二乗法を用いて解法することで、加速度センサ111の感応軸毎のゼロ点を求める。このため、求めた検出値に誤差が含まれる余地を低減することができる。よって、加速度センサ111の感応軸毎のゼロ点を精度よく求めることができる。これにより、加速度検出装置は、加速度センサ111に作用する加速度も精度よく求めることができる。
(もっと読む)
位置特定装置、位置特定方法、及び位置特定プログラム
【課題】移動体の現在位置を正確に特定することができる、位置特定装置、位置特定方法、及び位置特定プログラムを提供すること。
【解決手段】位置特定装置2は、移動体の現在位置を特定する現在位置検出処理部23と、音声を検出するマイク22と、マイク22により音響装置付信号機からの出力音が検出された場合、当該検出された出力音に基づき、現在位置検出処理部23により特定された現在位置を補正する位置補正部24aとを備える。
(もっと読む)
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】徒歩時の自律航法に用いられる対応テーブルの精度を向上することのできる情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、ユーザの絶対位置を取得する絶対位置取得部と、歩行する上記ユーザの身体の動きに応じた第1の値を取得する取得部と、上記第1の値、及び上記ユーザの歩幅又は歩行速度を示す第2の値の間の関係を示す関数を仮定し、上記第1の値及び上記絶対位置に基づいて上記関数に含まれる係数を算出することにより上記関数を特定する関数特定部と、上記関数を用いて、上記第1の値に対応する上記第2の値を算出する算出部と、算出される上記第2の値を用いて、上記ユーザの歩行テンポと上記第2の値との対応関係を学習する学習部と、を有する。
(もっと読む)
位置検出システム、端末装置及び位置検出プログラム
【課題】付近にある他の端末装置等で検出した位置を用いて位置検出を行うことができ、位置検出の確度を向上させることができる位置検出システム等を提供すること。
【解決手段】リクエスト側のユーザ端末装置10の情報送受信部41は、近くのユーザ端末装置10に対して、位置情報とGPSの電波強度の送信を求める。他のユーザ端末装置10の情報送受信部41は、各々のGPS受信部16からの位置情報と電波強度を、送信を求めたユーザ端末装置10宛に送信する。これを受信したユーザ端末装置10の座標算出部45は、受信した位置情報と電波強度及び近距離通信電波強度検知部42が検知した近距離無線通信の電波強度等に応じて、当該ユーザ端末装置10の位置を算出する。
(もっと読む)
ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法
【課題】車両における全地球測位システム(GPS)および推測航法(DR)の密結合の組合せのためのロード・マップ補正フィードバックを提供する。
【解決手段】ロード・マップ補正フィードバック補正付密結合GPSおよび推定車両航法は、車両ネットワーク上の車輪速度トランスデューサのデータを収集し、車両レンジおよび針路を演算する。現在の航法解に合うような道路セグメントのデータベースは、DVDディスク内のロードマップで提供される。推測航法は、GPS信号伝送がトンネル、駐車場および他の一般的な状況で失われるときに生じる航法解におけるギャップを埋める。ロードマップフィッティング制御は、推測航法のみが長時間作動した際に蓄積されるドリフトを制御する。
(もっと読む)
携帯端末及び位置及び方位推定プログラム
【課題】携帯端末及び位置及び方位推定プログラムにおいて、携帯端末に搭載されている比較的安価なセンサを利用して、携帯端末の位置及び方位を高精度に検知することを目的とする。
【解決手段】自己位置情報を格納した外部デバイスと短距離無線通信を行う慣性航法を用いる携帯端末において、携帯端末の加速度を検知して加速度情報を出力する検知部と、画像を撮影する撮影部と、外部デバイスと通信する通信部と、通信部が外部デバイスと通信可能になると、外部デバイスから受信した位置情報を携帯端末の初期位置に設定すると共に、加速度情報のAC成分に基づいて撮影タイミングを予測し、外部デバイスの画像を撮影タイミングで撮影するよう撮影部を制御し、外部デバイスの撮影画像から推定したヨー角を携帯端末の初期方位に設定する制御部を備えるように構成する。
(もっと読む)
31 - 40 / 275
[ Back to top ]