
国際特許分類[G01C21/28]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361)
国際特許分類[G01C21/28]の下位に属する分類
マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/28]に分類される特許
61 - 70 / 275
ナビゲーションデバイスの位置を決定すること
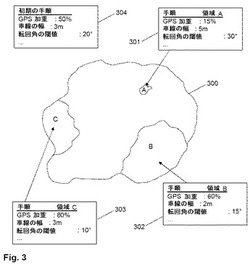
【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
(もっと読む)
位置算出方法及び位置算出装置

【課題】移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】GPSユニット3とINSユニット5とを備えた位置算出装置1において、影響度合設定部7は、位置算出を開始してから所与の条件が成立するまでの間は、GPS計測結果のINS計測結果に対する影響度合を第1の度合に設定し、所与の条件が成立した後は、影響度合を第1の度合よりも低い第2の度合に設定する。そして、カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、推奨経路上の施設を通過することにより発生する歩行距離と実際の移動距離との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置が階段に到達したとき(S41:Yes)、「階段の段数×80cm−階段の長さ」を基準地点からの移動距離から減算し(S42)、推定現在位置を更新する(S43)。
(もっと読む)
位置算出方法及び位置算出装置
【課題】 移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】 GPSユニット3とINSユニット5とを備えた位置算出装置1において、位置算出精度判定部6は、位置算出精度を判定する。影響度合設定部7は、位置算出精度判定部6により判定された位置算出精度に基づいて、GPS計測結果のINS計測結果に対する影響度合を設定する。カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
自位置特定システム、自位置特定プログラム及び自位置特定方法
【課題】データベースに整備されていない地物に基づいて自位置が特定されることを抑制し、データベースに整備されている地物に基づいて適切に自位置を特定する。
【解決手段】推定自位置情報を取得する推定自位置情報取得部1と、撮影画像取得部3と、地物データベース21fから、画像認識の対象となる対象地物の対象地物情報を取得する地物情報取得部4と、対象地物の画像認識を行なう画像認識部6と、画像認識結果と対象地物情報とに基づいて推定自位置情報を補正する位置情報補正部9と誤認識可能性の有無を判定する誤認識可能性判定部7と、位置情報補正部9による補正の要否を判定する補正要否判定部8とを備え、補正要否判定部8は、誤認識可能性が有ると判定された場合に、位置情報補正部9による補正が不要と判定する。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上のユーザの位置を推定して経路案内を行うナビゲーション装置において、推定した位置と実際の位置との間のずれを補正する。
【解決手段】経路案内手段29はナビゲーションサーバ10から提供された地図データ及び推奨経路データを用いて経路案内を行う。地下街では位置推定手段29aは歩数計などの移動センサ22bの計数値により現在位置を推定する。推定した現在位置が所定の施設の位置に到達したとき、その施設があるか否かを確認するメッセージを表示する。ないとの回答があった場合、その施設に到達したときに確認ボタンを押すことを要請するメッセージを表示し、確認ボタンが押されたとき、推定した現在位置を施設の位置に補正する。
(もっと読む)
位置補正装置および車車間通信システム
【課題】自車両(第1の車両)の周辺の障害物(第2の車両や歩行者)が衛星を用いて得た位置情報を、自車両(第1の車両)が前記障害物から受信する際に、衛星の測位情報に基づく位置ずれを考慮して、自車両(第1の車両)が受信した前記障害物の位置情報の位置の精度を向上する。
【解決手段】位置補正装置3を自車両(第1の車両)が備えることにより、自車両において、周辺の障害物が衛星を用いて得た当該障害物の位置情報を車車間受信機10が受信し、自車両が衛星を用いて得た自車両の位置情報をGPS受信部4が取得する。このとき、いずれの位置情報にも、衛星の測位情報に基づく位置ずれ(誤差)が含まれる。そして、算出部9により、GPS受信部4が取得する位置情報の位置ずれ量を算出し、補正部11により、算出部9が算出した位置ずれ量に基づいて車車間受信機10が受信する位置情報の位置を補正する。
(もっと読む)
端末位置判定装置および端末位置判定システム
【課題】車車間通信や歩車間通信によって端末間でやり取りされるGPS位置情報のような衛星を用いた位置情報の信頼度を判定する構成を提供する。
【解決手段】車車間通信部32が受信した他の端末のGPS位置情報と取得部33が取得した他の端末の移動速度および走行方向に基づき、推定部34によりGPS位置情報に基づく他の端末の存在位置を基準にして、つぎの時刻の他の端末の存在位置を推定し、判定部35により、推定部34が推定した他の端末のつぎの時刻の推定位置と、車車間通信部32がつぎの時刻に受信したGPS位置情報に基づく他の端末の存在位置との一致度に基づいて、他の端末から受信するGPS位置情報の信頼度を判定する。
(もっと読む)
位置情報補正システム
【課題】GPSで測位した位置情報を補正することができるようにした位置情報補正システムを提供する。
【解決手段】携帯電話機1の位置情報ログ取得部11は、GPS受信機を用いて位置情報をログとして取得する。送信部12は、位置情報ログ取得部11から取得した位置情報ログを、ネットワーク5を介してサーバー4に送信する。サーバー4の受信部41は、ネットワーク5を介して携帯電話機1から送信されてきた位置情報ログを受信し、記憶部42に記憶させる。位置情報精度判定部44は、記憶部42に記憶されている位置情報ログを読み出し、位置情報の精度を判定し、判定結果を位置情報補正部45に供給する。位置情報補正部45は、位置情報精度判定部44からの位置情報精度の判定結果から、位置情報ログの取得時刻の前後2つの位置情報ログに基づいて、位置情報ログを補正する。
(もっと読む)
車両情報取得装置、車両情報取得方法及びプログラム
【課題】車両の自車位置情報を高精度に取得できると共に処理負荷の軽減化を図ることが可能となる車両情報取得装置、車両情報取得方法及びプログラムを提供する。
【解決手段】自車両後方を撮像する撮像手段と、自車両の進行方位と速度を取得する取得手段と、前記撮像手段によって撮像された画像内から特徴点を抽出する抽出手段と、前記撮像手段によって撮像される画像内における前記特徴点の推定位置を前記進行方位と速度に基づいて算出し、当該特徴点が前記撮像手段によって撮像された後に撮像された画像内の前記推定位置に撮像されているか否かを判定する判定手段と、当該特徴点が前記推定位置に撮像されていないと判定した場合には、前記撮像手段によって撮像された画像内と前記撮像手段によって撮像された後に撮像された画像内の前記特徴点の移動位置及び形状に基づいて自車位置情報を取得する自車位置情報取得手段と、を備える。
(もっと読む)
61 - 70 / 275
[ Back to top ]