
国際特許分類[G01C21/30]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361) | マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/30]の下位に属する分類
地図のデータの構造または書式 (12)
国際特許分類[G01C21/30]に分類される特許
11 - 20 / 74
軌跡の信頼性判定装置及び方法及びプログラム
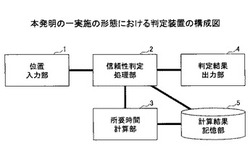
【課題】 入力された座標値の系列から復元される軌跡が、実際の移動の軌跡と一致するかを正確に判断する。
【解決手段】 本発明は、位置データを取得し、位置データの2点間の移動に要する時間を求め、所要時間記憶手段に格納し、所要時間記憶手段から移動に要する時間を取得し、入力された関数を用いて、位置データから復元される軌跡の信頼性スコアを算出する。算出された信頼性スコアが所定の閾値より大きい場合は、信頼できる軌跡と判定し、該所定の閾値より小さい場合は、信頼できない軌跡と判定して出力する。
(もっと読む)
現在位置算出装置および現在位置算出方法

【課題】本発明は、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術を実現する。
【解決手段】単一の地物又は予め定められた複数の地物で構成された地物群を認識地物単位として、画像認識に成功する割合である認識率を、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に決定する認識率決定部26と、認識地物単位のそれぞれの認識率に基づいて、画像認識処理において認識対象とする認識地物単位を選択する認識対象選択部25と、を備え、認識率決定部26は、道路幅方向に分かれて配置された地物群からなる特定認識地物単位については、当該特定認識地物単位を構成する地物の予想認識率ERに基づき定まる暫定認識率を、当該特定認識地物単位を構成する複数の地物の道路幅方向の配置形態に応じた補正係数Cにより補正して、認識率を決定する。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】複数の地物で構成された地物群について、画像認識処理における認識対象を決定するための認識率を適切に決定することが可能な技術を実現する。
【解決手段】画像認識処理を行う範囲として認識地物単位毎に設定される認識要求範囲を取得する認識要求範囲取得部27と、地物の種別毎に予め定められた予想認識率ERに基づき認識地物単位毎に認識率を決定する認識率決定部26と、認識要求範囲が互いに重複する複数の認識地物単位の中から認識率に基づき認識対象とする認識地物単位を選択する認識対象選択部25とを備え、認識率決定部26は、道路長さ方向に分かれて配置された地物群からなる特定認識地物単位について、各時点での各地物の画像認識結果に応じて、当該特定認識地物単位を構成する複数の地物の一部が画像認識された場合には当該特定認識地物単位を構成する残りの地物の予想認識率ERに基づき認識率を決定する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】右左折後の移動体の位置を迅速且つ正確に検出することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点で右左折したことを検出した場合に、高精度ロケーションシステムによって横断歩道を認識したか否か判定し(S14)、横断歩道を認識した場合に、対向車線の停止線の位置に基づいて右左折後の車両の詳細な現在位置を検出(又は既に検出された位置を補正)する(S15)ように構成する。
(もっと読む)
経路比較装置、経路比較方法、及びプログラム
【課題】経路情報のデータ構造や格納方式が異なる場合であっても、経路同士を比較して一致度合いを算出することができる経路比較装置、経路比較方法、及びプログラムを提供する。
【解決手段】経路比較装置は、スタート地点及びゴール地点の位置情報を取得する地点情報取得部と、上記スタート地点及び上記ゴール地点間のリファレンス経路の形状データを取得するリファレンス経路取得部と、上記スタート地点及び上記ゴール地点間の経路を探索する経路探索部と、上記経路探索部により探索された探索経路の形状データと、上記リファレンス経路の形状データとを比較することにより上記経路間の一致度合いを示すマッチング度を算出するマッチング度算出部と、を有する。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両のロールあるいはピッチングを加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された垂直線分を有する固定物を利用して、車両Vのロール角が検出される。また、水平線分を有する固定物を利用して、車両Vのピッチング角が検出される。物体検出センサ1で検出された固定物の位置情報が、決定されたロール角とピッチング角とに基づいて、車両Vが水平状態にあるときの位置情報に変換される(補正)。
(もっと読む)
移動体位置検出装置
【課題】マップマッチングによる移動体の現在位置の測位を、車両の進行方向を加味しつつ簡便かつ精度よく行えるようにする。
【解決手段】移動体としての車両Vに、道路周辺の物体を検出する物体検出センサ1が設けられる。車両Vの現在位置の測位に先立って、物体検出センサ1によって検出された所定の固定物についての検出データと地図データとをマッチングさせることにより、車両Vの進行方向の補正が行なわれる。補正された後の車両Vの進行方向に基づいて、移動体の現在位置の測位のためのマッチングが行われる。
(もっと読む)
存在確率分布推定装置及びプログラム
【課題】道路情報外においてもマップマッチングの手法を適用して、誤差分布の拡大を抑制した移動体位置の存在確率分布を推定する。
【解決手段】推測航法移動量分布算出部20で、ヨーレイトθobs、車速Vobs、各センサの推定計測誤差σθ及びσVに基づいて、自車両の移動量分布を算出し、推測航法軌跡算出部22で、θobs及びVobsの時系列データに基づいて、自車両の走行軌跡の形状を算出し、MM尤度分布算出部24で、地図情報の全グリッドについて、道路リンク上のMM尤度、またはそれより低い道路リンク外のMM尤度を算出したMM尤度分布を得て、第1分布算出部26で、前タイムステップの第2存在確率分布と移動量分布とを掛け合わせて、第1存在確率分布を算出し、第2分布算出部28で、第1存在確率分布とMM尤度分布とを掛け合わせて算出される第2存在確率分布を、現在の自車位置の存在確率分布として推定する。
(もっと読む)
11 - 20 / 74
[ Back to top ]