
国際特許分類[G01C21/30]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361) | マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/30]の下位に属する分類
地図のデータの構造または書式 (12)
国際特許分類[G01C21/30]に分類される特許
61 - 70 / 74
走行道路推定システム
【課題】車両がこれから走行する可能性のある道路を推定する精度を向上させ、現在位置を道路データ上に同定するマップマッチング処理及び車両制御や情報通知を適切に行う。
【解決手段】車両ナビゲーション装置1は、現在位置が同定された道路データに対応する道路である推定基準道路に接続している道路毎に車速や信号機の状態や走行レーンの状態等に基づいて車両が走行可能であるか否かを判定し、車両が走行不可能であると判定した道路を推定対象から除外し、車両が走行可能であると判定した道路だけを推定対象として車両がこれから走行する可能性のある道路だけを推定走行道路として推定する。
(もっと読む)
地図表示装置、制御方法、プログラム、及び記憶媒体

【課題】分岐地点通過後に車両が走行した道路を適切に特定可能な地図表示装置を提供する。
【解決手段】地図表示装置は、車両などの移動体に設置され、記憶部と、傾斜角度計測手段と、走行道路特定手段と、判定手段と、傾斜角度記憶手段と、を備える。記憶部は、地図情報を記憶する。傾斜角度計測手段は、移動体が走行した道路の傾斜角度を計測する。走行道路特定手段は、複数の分岐後道路に分岐する分岐地点を通過する場合であって、当該分岐後道路のうち少なくとも1の道路の傾斜角度が記憶部に記憶されていた場合、当該傾斜角度と、傾斜角度計測手段により計測された計測傾斜角度と、に基づき、分岐後道路から、前記移動体の走行道路の特定を行う。判定手段は、傾斜角度に基づく走行道路の特定が誤りであるか否か判定する。傾斜角度記憶手段は、傾斜角度に基づく走行道路の特定が誤りであると判断した場合、計測傾斜角度を記憶部に記憶させる。
(もっと読む)
ナビゲーションシステム、経路探索サーバ、ナビゲーション装置およびナビゲーション方法
【課題】車両が行政区画境界に接近したこととともに、接近した新たな行政区画の名称を予めユーザに報知することができるナビゲーションシステムを提供する。
【解決手段】行政区画データは、各行政区画のエリアを示すポリゴンと、少なくとも行政区画名称を有し、経路探索サーバ30は、推定位置算出手段37と行政区画判別手段38を備え、推定位置算出手段は、予め設定された所定の閾値距離と端末装置20の現在位置に基づいて、端末装置20が移動中の経路上における前記閾値距離だけ前方の推定位置を算出し、行政区画判別手段36は、現在位置が属する行政区画データと推定位置が属する行政区画データとを取得して行政区画が一致するか否かを判別し、行政区画判別手段36が前記行政区画の不一致を判別した場合、行政区画の境界が接近していることを、推定位置が属する行政区画名称とともに端末装置20に報知する。
(もっと読む)
移動体位置検出装置
【課題】位置情報精度を高めることができると共に、常時、その高い位置情報精度を維持できる移動体位置検出装置を提供する。
【解決手段】レーザレーダ3の検出データに基づく周辺物の複数の節点sと、地図データ上の当該周辺物の複数の節点mとを対応付け、その対応付けられた各組の節点s、mを用いて、座標変換式に基づき誤差θ、qx、qyを算出し、その誤差θ、qx、qyに基づきGPSにより検出された自車1位置を補正する。これにより、ありふれて存在する周辺物に関する複数の節点に基づき誤差算出を可能とし、誤差算出精度を高めると共に、位置補正頻度を高める。
(もっと読む)
移動端末、処理装置及びプログラム
【課題】現在位置の取得精度を維持しつつ、省電力化を図る。
【解決手段】絶対位置取得部30が、歩き始めの地点、歩き始めの地点から一定距離L1だけ離れた地点、及び一定距離L2だけ離れた地点で端末本体10の絶対位置を取得し、現在位置取得部36が、当該絶対位置を用いて歩行経路補正部35により補正された歩行経路に基づいて、端末本体の現在位置を取得する。この場合、一定距離L1は、端末本体が移動する2点間の実際の方位と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の方位との最大角度差が、所定範囲内となる2点間の距離であり、一定距離2は、端末本体が移動する2点間の実際の距離と、当該2点において絶対位置取得部により取得される絶対位置から求められる2点間の距離との最大距離差の実際の距離に対する割合が、所定範囲内となる2点間の距離とされている。
(もっと読む)
運転状態評価装置および運転状態評価システム
【課題】判定した道路種別に応じて運転診断に用いるための閾値を設定する場合において、ドライバに対しての評価を下げる誤診断を生じさせるような道路種別の誤判定を防ぐことを可能にする。
【解決手段】位置検出器11で検出した自車両の現在位置と記憶媒体17に記憶されている地図データとをもとに、自車両の走行中の道路を特定し、当該道路が高速道路と一般道路とのうちのいずれであるのかを逐次判定する位置情報依存トリガ生成部61cと、ETCゲートを自車両が通過したことを検出した場合に、自車両の走行中の道路が高速道路であると判定するETC情報依存トリガ生成部61aと、位置情報依存トリガ生成部61cでの判定結果とETC情報依存トリガ生成部61aでの判定結果とをもとに、自車両の走行中の道路が高速道路であるか一般道路であるかを決定する道路種別決定部62と、を備える。
(もっと読む)
自車両位置補正装置
【課題】交差点で自車両の位置補正を行う従来装置は、位置補正処理に適さない交差点でも実行するので位置補正に誤差が生じる。
【解決手段】自車両に搭載された撮像装置の映像から横断歩道検出手段で横断歩道を検出し、車両情報取得手段で自車両の現在位置と自車両方位を取得し、横断歩道検出手段と車両情報取得手段の情報から自車両の通過交差点の緯度経度を交差点位置算出手段で算出し、地図情報取得手段で地図情報記録手段から緯度経度情報と交差点の形成状態を示す交差点情報を取得し、自車両位置補正適正判定手段で、交差点位置算出手段と車両情報取得手段と地図情報取得手段からの情報により自車両位置情報の補正に適した交差点か否かを判定し、判定結果が自車両位置情報の補正に適した交差点と判定された時に自車両位置情報を補正する自車両位置情報補正手段を備える。
(もっと読む)
情報処理装置で実行される地図データを処理するためのコンピュータプログラム、方法及び地図表示装置
【課題】情報処理装置の進行する方位を迅速に検出できるとともに、電子コンパスの外部干渉による影響を低減できるコンピュータプログラムを提供する。
【解決手段】複数の異なる時刻において、各時刻における情報処理装置1の現在位置を検出するステップと、検出された各時刻における情報処理装置の現在位置を示す位置データを記憶するステップと、記憶されている位置データに基づいて、情報処理装置が進行している第2の方位を算出するステップと、第2の方位を反映させて、地図データに基づく地図画像をディスプレイに表示させるとともに、地図画像上に情報処理装置の現在位置を表示させるステップと、所定の表示切替条件が満たされたか否かの判定を行うステップとが実現され、判定ステップによって表示切替条件が満たされたと判定された場合には、第2の方位が反映されてディスプレイ上に表示されている地図画像を、第1の方位を反映させた表示に切替る。
(もっと読む)
動態管理システムおよび動態管理方法
【課題】GPS信号が受信できない場合や、無線通信が行えない場合でも、車載端末の位置および到着予想時間を表示できる動態管理システムを提供する。
【解決手段】車載端末では、ジャイロ機能と車速パルスから算出する位置情報をGPSからの位置情報と比較し、キャリブレーションを行う。移動距離のズレの傾向を蓄積し補正値を作成し、GPS信号が受信できない時のジャイロ機能と車速パルスから算出する位置情報に補正値を加算する。動態管理サーバは、車載端末の位置情報に対するマップマッチングを行い、交通情報を基に車両の移動範囲を予測する。車載端末からの位置情報がGPS以外のデータが続いた場合、通過予定のPOI情報を車載端末へ送信する。車載端末の表示部に表示されたPOI情報に対応する施設を通過したらボタンを運転者に押させることで、動態管理サーバは車載端末の位置情報を取得し、予想到着時刻と誤差レベルを決定する。
(もっと読む)
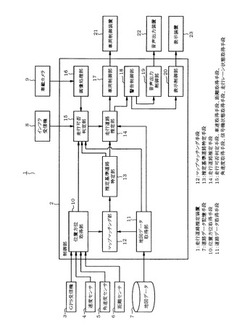
ナビゲーション装置および方法
位置センサから信号を受信する受信機と、シード位置とエリア内でナビゲート可能なルートのマップとを備えるマップデータを内部に格納したメモリと、現在位置を出力する、ディスプレイまたはスピーカ等の出力装置とを備えるナビゲーション装置。前記ナビゲーション装置は、前記信号から移動距離および方位変化を判定する工程および前記マップデータの前記ナビゲート可能なルートの一つにおける前記現在位置を推定する工程のためのプロセッサと、をさらに備える。前記推定する工程は、前記移動距離および前記方位変化を使用して、前記ナビゲーション装置が移動していたかもしれない前記ナビゲート可能なルートに沿った可能性のある経路を前記シード位置から推定し、前記ナビゲーション装置が当該経路を移動した確率を各経路に割り当てることを含む。方位変化について、前記プロセッサは、各経路を拡張し、前記ナビゲーション装置が当該経路を移動した確率を再計算する。前記プロセッサは、前記現在位置を、最高確率を有する経路上で現在の予測位置になるように割り当てる。 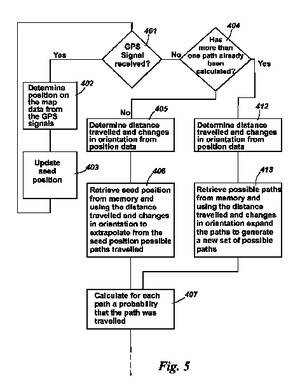 (もっと読む)
(もっと読む)
61 - 70 / 74
[ Back to top ]