
国際特許分類[G01C21/30]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361) | マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/30]の下位に属する分類
地図のデータの構造または書式 (12)
国際特許分類[G01C21/30]に分類される特許
71 - 74 / 74
画像ベースの表面トラッキング
画像取り込装置(12)を使用することによる画像追跡。前記方法は、画像取り込装置の使用によりシーン(54)の取り込画像を行なう工程、及び画像処理アルゴリズム(64)を使用することにより1セットの画像を分析することによる画像取り込装置(12)の追跡移動(62)を含んでいる。 (もっと読む)
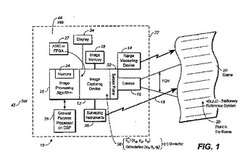
軌道ベースのロケーション決定

ここで開示する主題事項は、移動体デバイスの動きの推定された軌道を使用して、特に、推定された軌道と、1つ以上の予め定められた候補の軌道との比較を使用して、移動体デバイスのロケーションを決定することに関する。 (もっと読む)
位置確認のために三次元位置と二次元強度のマッピングを組み合わせるための方法と装置
マッピング方法は、第1のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために該第1のモバイルユニットを使用する工程を含む。該特徴の三次元位置はマッピング中に検知される。三次元マップは、特徴の三次元位置と二次元の特徴のマップとの間の関連性を含むように作成される。三次元マップは第1のモバイルユニットから第2のモバイルユニットに提供される。第2のモバイルユニットは、第2のモバイルユニットが表面を横断する間に、二次元の特徴のマップを作成するために使用される。第2のモバイルユニットによってマッピングされた二次元の特徴の三次元位置は、第2のモバイルユニット内で、三次元マップを使用することにより測定される。 (もっと読む)
地理的位置の現在の測定値を地図対象物に割り当てるための装置および方法
地理的位置の現在の測定値12−nを、地理的地図の地図対象物14に割り当てるための装置20。処理装置22は、現在の測定値12−nが、第1の地図対象物14−1に割り当てられるかどうかを指示する、第1の確率測度P1を決定し、かつ、仮に、第1の確率測度P1が、第1の地図対象物14−1への現在の測定値12−nの割り当てがありそうもないことを示すならば、現在の測定値12−nが、第2の地図対象物14−2に割り当てられるかどうかを指示する、第2の確率測度P2を決定する。現在の測定値12−nは、隣接地理的位置の一連の隣接測定値から発生する。一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に既に、第1の地図対象物14−1に割り当てられている。第2の地図対象物14−2は、第1の地図対象物14−1との交差点を有している。 (もっと読む)
71 - 74 / 74
[ Back to top ]