
国際特許分類[G01C21/30]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361) | マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/30]の下位に属する分類
地図のデータの構造または書式 (12)
国際特許分類[G01C21/30]に分類される特許
1 - 10 / 74
ナビゲーション装置
【課題】車線情報を最新の状態に保つための作業量及び車線情報量を低減するとともに、走行車線を正確に求めることのできるナビゲーション装置を提供する。
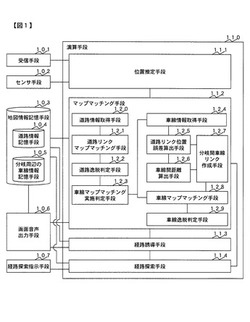
【解決手段】ナビゲーション装置は、移動体の位置を推定する位置推定手段111と、推定された移動体の位置に対応する道路リンク候補点を特定する道路リンクマップマッチング手段121と、分岐周辺の車線情報記憶手段105から道路リンク候補点の前後に存在する各対象分岐の周辺の車線情報を取得する車線情報取得手段124と、取得した車線情報を用いて各対象分岐の周辺の道路リンクの位置誤差を算出する道路リンク位置誤差算出手段125と、取得した車線情報を用いて各対象分岐の周辺の車線間距離を算出する車線間距離算出手段126と、算出した位置誤差と車線間距離を用いて各対象分岐間の車線リンクを作成する分岐間車線リンク作成手段127とを備える。
(もっと読む)
移動経路特定装置および移動経路特定方法ならびにそのプログラム

【課題】車両が過去に走行した移動経路を精度良く算出することができる移動経路特定装置を提供する。
【解決手段】過去の移動経路と推定した各道路の道路IDを保持する推定移動経路情報を複数生成し、移動経路の候補の可能性の低い推定移動経路情報を移動経路外の推定移動経路情報と判定する。そして、移動経路外の推定移動経路情報と判定された推定移動経路情報以外のいずれかの推定移動経路情報に含まれる道路IDを、確定した過去の移動経路を示す道路IDとして出力する。
(もっと読む)
ナビゲーション端末及びその位置の取得方法
【課題】設備コストを抑え且つ所定精度を確保して端末の位置を取得できるようにする。
【解決手段】ランドマーク距離決定部3はランドマークLMkからの測位信号で端末1との間の距離を決定し、代表位置設定部4はマップ情報より、ランドマークを中心とし決定距離に等しい円上にあり、且つ端末1が移動可能な通路区画上にある位置から、端末1の候補位置としての代表位置を設定する。自律航法位置推定部6は自律航法によりランドマークから移動してきた端末1の位置を推定する。端末位置補正部7は、推定位置と代表位置とに基づく補正処理により、端末1の位置を取得する。
(もっと読む)
慣性航法システムのための誤差修正を備えた方法、装置、およびシステム
【課題】慣性航法システムのための誤差修正方法を提供する。
【解決手段】この方法は、移動対象の現在の位置決めパラメータ、航法マップに基づく基準位置決めパラメータ、およびGPSに基づく基準位置決めパラメータに基づいて慣性航法システムの動作状態を決定するステップと、慣性航法システムの初期パラメータをGPSに基づく基準位置決めパラメータに置き換えるステップと、慣性航法システムが異常動作状態にあると決定された場合、慣性航法システムを初期状態にリセットするステップとを有する。
(もっと読む)
地図表示装置、地図表示方法、および、コンピュータプログラム
【課題】推奨経路や道路ネットワークを表すデータを用いることなく、地図表示装置が検出した現在位置を地図上の適切な位置に表示する。
【解決手段】地図表示装置としての携帯電話は、地図サーバから地図データを取得する。地図データには、地物の位置及び形状を表す図形データと、地物の種別を表す属性情報とがそれぞれ対応付けられて複数記録されている。携帯電話は、GPS受信機を用いて現在位置を検出すると、検出された現在位置の近傍に存在し、利用者が存在し得る地物を、図形データと属性情報とに基づき特定する。こうして、現在位置の補正の基準となる地物を特定すると、携帯電話は、特定された地物上の所定の位置に現在位置を表示する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の位置を正確に検出することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点を直進して通過する場合に、バックカメラ19で撮像した画像に基づいて車両が走行する道路上に存在する地物を検出し(S13)、検出された地物の配置パターンである検出配置パターンが、分岐点へ進入する進入道路上に設けられた地物の配置パターンである進入側配置パターンと一致する場合に、分岐点の周辺に設けられた地物又は分岐点のノードとの相対位置によって移動体の位置を特定する(S18、S19)ように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両の走行距離を検出する為の車速センサ22の検出誤差が、車両の検出位置に対して誤差を生じさせる方向を特定する(S41〜S43)とともに、車両の方位変化を検出する為のジャイロセンサ24の検出誤差が、車両の検出位置に対して誤差を生じさせる方向を特定し(S44〜S46)、特定された方向に基づいて車両の検出位置の誤差範囲を推定する(S47)ように構成する。
(もっと読む)
停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラム
【課題】路面に形成された停止線を適切に検出することを可能にした停止線検出システム、停止線検出装置、停止線検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、停止線の候補となる地物(停止線候補)を検出した場合に、停止線候補が道路幅方向に対して所定長さ未満の形状を有する複数の線分から構成され、車両から複数の線分までの各距離が等距離であり、且つ複数の線分の内で道路幅方向の両端に位置する2つの線分の外側端部間の長さが所定長さ以上であると判定された場合に、該停止線候補を停止線として検出するように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が走行する道路の車線数から車両が走行中の道路で行うことができる最大の車線変更回数を特定し(S52)、特定された最大の車線変更回数に基づいて車両の検出位置の誤差範囲を推定する(S53)ように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて車両の現在位置を検出するとともに、停止線の認識後は推測航法によって車両の現在位置を検出し、車両が所定角度で屈曲した屈曲道路を移動する場合に、該屈曲道路の車線幅と車線数と屈曲角度とに基づいて、推測航法により検出された車両の現在位置の誤差範囲を推定するように構成する。
(もっと読む)
1 - 10 / 74
[ Back to top ]