
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
1,001 - 1,010 / 1,603
踏切障害物検知装置
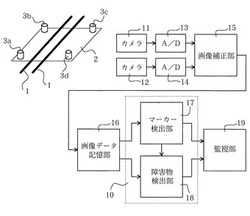
【課題】 固体撮像素子を有するステレオカメラを用いた踏切障害物検知装置において、踏切の監視領域を簡単且つ確実に特定できるようにすること。
【解決手段】 踏切障害物検知装置は、鉄道レール1の監視領域の境界を特定する位置に設置された立体マーカー3a,3b,3c,3dと、前記監視領域を撮影し画像データを出力する固体撮像素子を有する一対のテレビカメラ11,12と、前記画像データを処理して立体マーカー3a,3b,3c,3dを特定するマーカー検出部17と前記画像データを処理して前記監視領域内に存在する障害物を検出する障害物検出部18を備える検出部10とで構成されている。
(もっと読む)
位置検出用受光素子およびその製造方法およびセンサおよび電子機器

【課題】測距対象物までの距離に比例する出力が正確に得られる位置検出誤差の少ない位置検出用受光素子を提供する。
【解決手段】N型基板1と、N型基板1表面に形成されたP型抵抗層8と、P型抵抗層8の両端側にそれぞれ接続された2つの第1アノ−ド電極4と第2アノ−ド電極5とを備える。N型基板1とP型抵抗層8とから受光部9を構成し、受光部9に入射する入射光位置に応じた光電流が第1アノ−ド電極4と第2アノ−ド電極5から出力される。P型抵抗層8は、第2アノ−ド電極5から第1アノ−ド電極4に向かって不純物濃度が高くなるよう配置された5個の異なる不純物濃度の抵抗部8a〜8eからなり、抵抗部8a〜8eの隣り合う境界部分は、不純物濃度の高い側の抵抗部の不純物濃度以下で、かつ、不純物濃度の低い側の抵抗部の不純物濃度以上である。
(もっと読む)
測距装置
【課題】物体までの距離が短いか、長いかにかかわらず、当該物体までの距離の計測が精度よく行える測距装置を提供する。
【解決手段】測距装置1は、物体までの距離が長いときには、LD3aがレーザ光を発信してから、PD4aが反射光を受光するまでの経過時間を計測し、この経過時間に基づいてLD3aが発信したレーザ光を反射した物体までの距離を計測する。一方、物体までの距離が短いときには、画像処理部8から入力された、撮像画像における、撮像レンズの光軸位置と、LD3aから発信されたレーザ光の照射位置と、の相対的な位置関係から、物体までの距離を算出する。
(もっと読む)
光波測距方式及び測距装置
【課題】測距精度を向上させると共に測距可能な距離を伸ばすことができ、安価に測距装置を構成することが可能となる光波測距方式及び測距装置を提供する。
【解決手段】第一のPN符号により符号変調された光波を、測距ターゲットに対して発信すると共に第一のPN符号と同一符号で、かつ微小に異なる周波数を有する第二のPN符号を生成して第一のPN符号と第二のPN符号との相関値を低周波の波形信号へと変換し、測距ターゲットにより反射された光波を第二のPN符号を印加した受光素子によって受信し、積分処理して低周波の波形信号へと変換し、送信側相関信号と受信側相関信号との位相差を求め、その位相差から測距ターゲットまでの距離を算出する。
(もっと読む)
レーザ測距装置及びレーザ測距方法
【課題】ターゲットとの距離に応じた受信レベルの変化に幅広く対応して、必要なダイナミックレンジを確保するとともに、機械的な可動部による信頼性の低下を回避する。
【解決手段】レーザダイオード2から出力されるパルスレーザ光をターゲットに向けて送信するとともに、ターゲットに反射したパルスレーザ光を、受信光の波長を選択するバンドパスフィルタ4を介して受信し、送受信したパルスレーザ光の回帰時間測定に基づいて、ターゲットとの距離を測定するレーザ測距装置1又はレーザ測距方法において、レーザダイオード2の加温や冷却に基づいて、レーザダイオード2から出力されるパルスレーザ光の波長を変更し、レーザダイオード2から出力されるパルスレーザ光の波長を、バンドパスフィルタ4の透過中心波長に対してシフトさせることにより、ターゲットに反射したパルスレーザ光の受信レベルを制御する。
(もっと読む)
人数計測システム
【課題】建屋内もしくは室内に滞留する人数を計測する。
【解決手段】人物検出手段は人の出入りする場所の上方に設けられた複数台のカメラからなる撮像手段からの画像データにより距離情報を得るから、床上の影の距離情報と人物の距離情報とから区別して人物を検出することができ、人物計数手段は検出された人物について移動を追跡し、移動方向を検出してその人数を計数し、滞留人数計数手段において正確に滞留人数を計数することかできる。
(もっと読む)
変位計測装置
【課題】本発明の課題は、計測点の変位を精度良く算出できる変位計測装置を得ることである。
【解決手段】撮像素子に撮影した複数の計測対象物10の変位前後の画像から任意の計測点3aの変位量を算出する変位計測装置1において、撮像素子に撮影した画像を処理する画像処理部13を備え、画像処理部13は画像の複数の計測点3aから任意の一の計測点を基準点12として選択する基準点選択手段24と、基準点12に基づいて各計測点3aの変位量を算出する変位量算出手段25とを備え、基準点選択手段24は先に撮影した画像の計測点3aの座標値と後から撮影した画像の計測点3aの座標値の変化量から基準点12を選択しており、任意の計測点3aの座標値の変化量が所定量より小さいと判断した場合、かかる計測点3aを基準点12としている。
(もっと読む)
距離画像生成装置、距離画像生成方法及びプログラム
【課題】総処理時間の短縮を図りつつ、サブピクセルレベルの演算において高精度の演算結果を得て信頼性の高い距離画像を生成することのできる距離画像生成装置、距離画像生成方法及びプログラムを提供する。
【解決手段】第1画像情報と比較対象となる第2画像情報とを取得する画像取得手段と、SAD演算法により基準画像と参照画像とを照合して、ピクセルレベルにおける視差値の算出を行う第1演算部15と、SAD演算法よりも精度のPOC演算法により基準画像と参照画像とを照合して、サブピクセルレベルにおける視差値の算出を行う第2演算部16と、第1演算部15による視差値の算出結果に基づいて、第2演算部16により演算を行う対象領域を設定する対象領域設定部14と、を備えている。
(もっと読む)
受光装置、レーザレーダ装置および乗り物
【課題】測定精度の低下または対象物の誤検出が十分に防止された受光装置およびそれを備えたレーザレーダ装置ならびにそのレーザレーダ装置を備えた乗り物を提供する。
【解決手段】APD81にバイアス電圧Vbaが印加される。APD81に光が入射すると、APD81には入射光量Pに応じた電流が流れる。コンデンサ83はAPD81の出力電流の直流成分を除去し、入射光電流Idを出力する。I−V変換回路84は入射光電流Idを入射光電圧Vdに変換する。増幅回路85は入射光電圧Vdを増幅し、受光パルスVaを出力する。反転増幅回路86は受光パルスVaを反転増幅し、反転増幅電圧Viaを出力する。半波整流回路87は反転増幅電圧Viaを半波整流し、ノイズレベルVnDCを出力する。バイアス制御回路88はノイズレベルVnDCに基づいてバイアス電圧Vbaを負帰還で制御する。
(もっと読む)
距離マップ生成型マルチレンズカメラ
撮像出力信号に基づき光景についての出力画像を生成する電子カメラであって、第1センサ出力をもたらす第1イメージセンサ及びその上に視野内光景の第1画像を発現させる第1レンズを有する第1撮像部と、第2センサ出力をもたらす第2イメージセンサ及びその上に視野内光景の第2画像を発現させる第2レンズを有する第2撮像部と、を備える。第1及び第2イメージセンサの焦点距離を違える。処理部で、第1及び第2センサ出力のうち一方を撮像出力信号として選定する一方、光景内諸点までの距離を指し示す距離マップを第1及び第2センサ出力双方に基づき生成する。 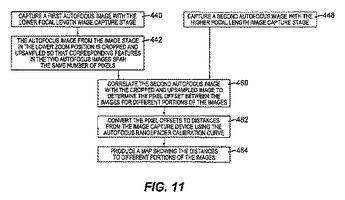 (もっと読む)
(もっと読む)
1,001 - 1,010 / 1,603
[ Back to top ]