
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
31 - 40 / 1,603
レーザレーダ装置およびレーザレーダ装置による撮像目標選択方法
【課題】背景に輝度の非常に高いクラッタが存在する場合、画像信号からクラッタ成分を除去できない。
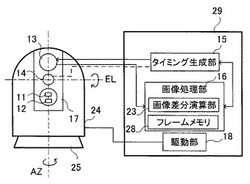
【解決手段】一実施形態によれば、レーザ光の送信部11と、受信部12と、複数の撮像素子を有する撮像部13と、目標までの相対距離を演算し受信タイミング信号を出力する測距器14と、この受信タイミング信号の受信期間に重なる第1の露光タイミング信号およびこの受信期間と重ならないタイミングを持つ第2の露光タイミング信号を撮像部13へ与えるタイミング生成部15と、各露光タイミング信号によって撮像された画像信号から複数の画素および画素毎の輝度を対応させた画像データを生成する画像処理部16とを備え、画像処理部16は第1の露光タイミング信号により目標および背景を含む画像を生成し、第2の露光タイミング信号により背景を含む画像を生成し、これらの画像間で輝度の差分を求めるレーザレーダ装置が提供される。
(もっと読む)
3次元計測システム及び3次元計測方法

【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、精度が高い距離情報を生成できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、基準画像における隣接画素間の色情報の差分絶対値が色情報閾値Tc以下であるか否かによって、隣接画素間でメッセージを伝搬できるか否かを判定するメッセージ伝搬制限判定部12と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部13と、メッセージの評価関数を計算する評価関数計算部14と、評価関数が最小となる距離を、距離情報として推定する距離推定部15とを備える。
(もっと読む)
距離画像生成装置および距離画像生成方法
【課題】光飛行型距離画像生成装置によって撮影空間の距離画像生成する際、同一撮影空間内に同時期に複数の光飛行型距離画像生成装置が存在する場合であっても、精度良く測距を行う。
【解決手段】光源から照射する変調光の発光(ON)期間と、電荷蓄積部の各単位蓄積部における電荷の蓄積期間とを一定としながら、変調周期毎に周期の長さを変化させるよう、発光と蓄積とを制御する。周期の長さは、予め定めた固定の変調周期Tsに、周期毎に異なる付加時間を付加することにより変化させる。そして、付加時間中に取得した電荷は廃棄する。
(もっと読む)
固体撮像装置
【課題】偏光測定の高精度化を図ることができる固体撮像装置を提供する。
【解決手段】実施形態に係る固体撮像装置は、上面に複数の画素が形成された撮像基板と、前記撮像基板の上方に設けられ、光軸が前記撮像基板の前記上面と交差する結像レンズと、前記撮像基板と前記結像レンズとの間に設けられ、複数のマイクロレンズが2次元的に配置された面が、前記光軸と交差するマイクロレンズアレイ基板と、前記撮像基板と前記結像レンズとの間に設けられ、偏光軸の方向が相互に異なる複数の種類の偏光板が2次元的に配置された偏光板アレイ基板と、を備える。一つの前記偏光板で偏光された光は、一つの前記マイクロレンズによって集光されて前記撮像基板の前記上面で結像する。
(もっと読む)
距離マーカ投射装置及びこれを備えた距離測定装置
【課題】所定距離にマーカを投射し、当該所定距離の位置をユーザに視認させることのできる装置を提供する。
【解決手段】面上に光によるマーカを投射する装置であって、光によるマーカを投射するための光源5と、装置本体からマーカを投射する面上の所定位置までの当該面上における距離を記憶する記憶手段7と、面から装置本体までの高さを距離計の出力に基づいて求める手段4と、装置本体からマーカを投射する面上の所定位置までの面上における距離と面から装置本体までの高さとに基づいて、マーカを面上の所定位置に投射するための光源の光軸の角度を算出する演算手段8と、算出された光軸の角度に基づいて光源の光軸の角度を駆動制御し面上の所定位置にマーカを投射させる手段6とを備えた。
(もっと読む)
物体検出装置を搭載する移動体
【課題】演算コストがより低い物体検出装置を搭載する移動体を提供すること。
【解決手段】本発明に係るショベル60に搭載される物体検出装置100は、2つのカメラのそれぞれが撮像するカメラ画像の視差に基づいて物体を検出する。物体検出装置100は、被撮像空間を通る仮想直線上の複数の検査点のうちの1つに対応する画素を含む部分画像をカメラ画像から抽出する部分画像抽出部10と、同一の検査点に対応する各カメラ画像の部分画像同士の類似度に基づいて検査点に関する評価値を決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体の存否を判定する物体存否判定部12とを備える。仮想直線は、ショベル60が動いたときにショベル60の一部が到達可能な空間領域を通る。
(もっと読む)
運転支援装置
【課題】車両近傍の物体検出を精度よく行うことができる運転支援装置を提供することを目的とする。
【解決手段】本発明の運転支援装置は、車両周囲を撮像する撮像カメラ10と、車両周囲に照射光を発するLED23と、反射光を取得する第2の撮像素子21と、反射光に基づいて距離画像を算出する第2の信号処理部22と、距離画像から物体を検出する物体検出処理部36とを備える。そして、第2の信号処理部22が算出した距離画像のうち物体検出処理部36が検出した物体を示す画像を撮像カメラ10が撮像した撮像画像に合成する合成手段37と、この合成手段37が合成した合成画像を表示する表示装置40を備えたことを特徴とする。
(もっと読む)
ステレオカメラ及びステレオカメラの校正方法
【課題】障害物までの距離を測距するステレオカメラが取り付けられたガラスに歪みが発生しても、光軸のずれによる測距精度の低下を抑制する。
【解決手段】フロントガラス10の上部内面に、独立した左右一対のカメラ12L及び12Rを取り付けると共に、カメラ12L及び12Rの間に位置するフロントガラス10の内面に、歪み検出方向が異なるように配置された2つの歪みセンサ16及び18を取り付ける。そして、制御装置20は、歪みセンサ16及び18で検出した歪みA及びBと補正値とを関連付けた補正マップを参照し、カメラ12L及び12Rで撮像された一対の画像について、矩形領域の部分画像を切り出す位置を補正値だけずらすことで、光軸のずれを校正して測距精度の低下を抑制する。
(もっと読む)
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、駆動制御の複雑化を抑え、三次元的な認識の高速化を図り得る構成を提供する。
【解決手段】レーザレーダ装置1には、複数の受光素子21が二次元的に配置されてなる受光センサ20が設けられ、この受光センサ20は、ミラー30の上方側において反射部31によって導かれた反射光を受光領域にて受光する構成をなしている。一方、レーザダイオード10から外部空間に照射されるまでのレーザ光L1の投光経路には、凸状鏡71が配置され、偏向部41から外部空間に向かうレーザ光L1を少なくとも中心軸42aの方向に拡がらせている。そして、外部空間からの反射光が偏向部41に入射するときの入射の向きに対応して受光領域での反射光の入射位置が定まるように構成されている。
(もっと読む)
31 - 40 / 1,603
[ Back to top ]