
国際特許分類[G01D5/244]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | パルスまたはパルス列の特性に作用するもの;パルスまたはパルス列を発生するもの (2,921)
国際特許分類[G01D5/244]の下位に属する分類
パルス列におけるパルスの変化数を利用するもの (2,022)
個々のパルスの持続期間の変化によるもの (1)
パルスの時間シフトを利用するもの
パルスの繰返し周波数の変化によるもの (1)
パルスコードを利用するもの (93)
国際特許分類[G01D5/244]に分類される特許
1 - 10 / 804
回転角度検出装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
回転角信号断線検出方法及び装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
位置検出回路および位置制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
エンコーダ搭載機器およびエンコーダ装置
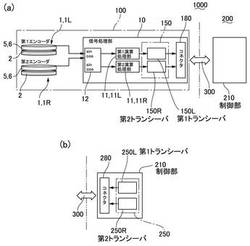
【課題】簡素な回路構成で、複数のエンコーダの検出結果を伝送することのできるエンコーダ搭載機器、およびエンコーダ装置を提供すること。
【解決手段】エンコーダ装置100およびエンコーダ搭載機器1000では、エンコーダ装置100側および制御部210側に同期式の半2重シリアル通信用のインターフェース機器150、250を設け、制御部210は、複数の演算処理部11での演算結果が各々送信されるタイミングを規定する指令信号を異なるタイミングで送信する一方、エンコーダ装置100は、指令信号に対応するタイミングで複数の演算処理部11での演算結果、および複数の演算処理部11での演算結果が出力されるタイミングに対応する同期信号CLKの各々をシリアル信号として出力する。
(もっと読む)
角度検出装置、モータ駆動装置及び画像形成装置

【課題】コスト増加を伴わずにモータの回転角を安定的かつ高精度で検出することができる角度検出装置を提供する。
【解決手段】角度検出装置は、モータの回転子の回転角度に応じて正弦波状に変化する正弦波信号であって、互いの配置位置により位相の異なる正弦波信号を出力する複数のセンサ(15)と、少なくとも2つの前記正弦波信号同士を相互演算した結果により表されるベクトルを生成するベクトル生成手段(30)と、前記ベクトルと複数の位相を有する基準正弦波とを演算することにより、前記ベクトルを回転させるベクトル回転手段(40)と、前記ベクトル回転手段を用いて、前記ベクトルが所定位相になるまで前記ベクトルを順次回転させ、回転前の前記ベクトルと当該所定位相のなす角度をモータの回転子の回転角度として検出する角度探索手段(50)とを備える。
(もっと読む)
位置検出装置
【課題】記憶回路の冗長性を確保すると共に、電源電圧が低下した場合に所望の出力を得ることの可能な位置検出装置を提供する。
【解決手段】位置検出装置としての磁気検出IC10は、通常動作モードの際、磁気検出素子11から出力された信号をDSP13によって処理した後、F/F14に記憶し、D/A16を経由して外部へ出力する。その際、F/F14の出力値をメモリ17が記憶する。モニタ回路40は、電源瞬断モードを検知すると、F/F14とメモリ17との間の信号、およびF/F14とD/A16との間の信号を遮断する。そして更新を止めたメモリ17の信号をD/A16へ出力する。一方、モニタ回路40は、長時間電源落ち込みモードを検知すると、メモリ17の信号をHiまたはLoに固定し、D/A16へ出力する。
(もっと読む)
電動機の駆動装置
【課題】駆動装置側に複数種類の通信プロトコルに応じた通信部及び検出プログラムを備えることで、使用する検出器の選択肢を拡大する。
【解決手段】電動機の可動子の位置または速度を検出するエンコーダの検出データを、エンコーダとの間のシリアル通信により取得し、前記検出データを用いて電動機を駆動する駆動装置において、複数のエンコーダ2a,2b,2cがそれぞれ有する複数種類の通信プロトコルに従って前記検出データを送受信可能な複数の通信部3331a,3331b,3331cと、これらの通信部を介して受信した前記検出データを処理する複数の検出プログラム3342a,3342b,3342cとを備え、各通信プロトコルに従って送信されたデータ要求コマンドに対する応答データが正しいことをもってエンコーダの通信プロトコルを同定する。
(もっと読む)
車輪回転角度検出装置
【課題】ABS信号を用いて、車輪回転角度を高精度で検出する。
【解決手段】車輪一回転につきN周期の正弦波状の波形を有するABS信号を用いて、車輪回転角度を検出する。車輪回転角度検出装置は、角度信号生成部を有する演算器を具え、該角度信号生成部は、ABS信号を時間について微分したABS微分信号を生成するステップと、ABS信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P1、P2を生成するステップと、前記ABS微分信号を振幅中心を閾値として2値化し、その2値化信号のエッジパルスである角度信号P3、P4を生成するステップとを行うことにより、一周期の波形毎に前記4つの角度信号P1〜P4を含む角度信号Pを生成する。
(もっと読む)
多回転アブソリュート回転角検出装置及びアブソリュート回転角を検出する方法
【課題】主軸の回転角度検出方法で、広い多回転検出範囲を得られ、かつ、高い検出精度を達成することのできるアブソリュート回転角検出方法と、多回転アブソリュート回転角検出装置を提供する。
【解決手段】本検出装置は、主軸ギヤ10bと歯車接合した第1〜第3副軸ギヤを具備する歯車機構1からなり、主軸ギヤと第1副軸ギヤの歯数差は、2又はそれを越える整数aであり、また主軸ギヤと第2副軸ギヤの歯数差は、1であり、第1軸の歯数は主軸に対する歯数差と主軸検出器の軸倍角の積の整数倍の関係を有する。各軸の回転角を角度検出器RS0〜RS3で検出する。主軸の回転角度と、主軸と第1〜第3副軸との間の回転角度の差を表す周期信号値をそれぞれ生成し、各周期信号値から求められた第1〜第3副軸の相対回転数の組み合わせに基づいて主軸の回転数を求める。主軸の回転数に回転角度を加えて多回転アブソリュート回転角を得ることができる。
(もっと読む)
角度検出器の自律校正方法、角度検出器、円周目盛校正装置および角度検出器の校正装置
【課題】逐次2点法を用いて1回転の各角度位置において目盛誤差を精度良く算出可能な角度検出器の自律校正方法を提案すること。
【解決手段】角度検出器の自律校正方法は、第1目盛読取ヘッド11と第2目盛読取ヘッド12を、1回転を整数等分せず、且つ、複数回転Nを整数M等分する角度間隔αで配置し、目盛円板がN回転する間における第1、第2目盛読取ヘッド11、12の読みを、予め定めたデータサンプリング間隔でデータ読取装置13に取り込む。データ読取装置13では、第1、第2目盛読取ヘッド11、12の読みの差から、データサンプリング間隔で得られる、目盛円板4、5の角度目盛誤差に関する逐次2点法によるデータを生成し、複数回転N分のデータの平均がゼロになることを利用して、データを合成することで、目盛円板4、5の目盛誤差(校正値)をデータサンプリング間隔で求める。
(もっと読む)
1 - 10 / 804
[ Back to top ]