
国際特許分類[G01D5/245]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 特に特定の変量に適用されない測定;単一のほかのサブクラスに包含されない2つ以上の変量を測定する装置;料金計量装置;他に分類されない測定または試験 (10,355) | 感知要素の出力を伝達するための機械的手段;感知素子の型式や特性が変換手段を束縛しない場合に,感知要素の出力を別の変量に変換する手段;特に特定の変量に適用されない変換器 (5,752) | 電気的または磁気的手段を使用するもの (4,262) | パルスまたはパルス列の特性に作用するもの;パルスまたはパルス列を発生するもの (2,921) | パルス列におけるパルスの変化数を利用するもの (2,022)
国際特許分類[G01D5/245]に分類される特許
81 - 90 / 2,022
位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置
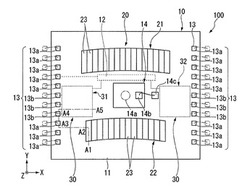
【課題】小型化が可能な位置情報検出センサ、位置情報検出センサの製造方法、エンコーダ、モータ装置及びロボット装置を提供する。
【解決手段】光学パターンを介した光を検出する光検出部20と、磁気パターンによる磁場を検出する磁性薄膜をそれぞれ有す第1検出部31と第2検出部32からなる磁場検出部30とを備え、光検出部20と磁場検出部30とは、同一のチップ基板10に第1検出部31と第2検出部32が光検出部20を挟む位置に配置されている。
(もっと読む)
セグメントカウンタと精密位置センサとを同期させるための方法および装置

【課題】本発明は、ウィーガンドセンサに基づくセグメントカウンタの値と精密位置センサの値とを正確に同期させるための新規なスペースおよびコストを節約した方法を提供する。また、この方法を実行するための装置を提供する。
【解決手段】ウィーガンドセンサを含むセグメントカウンタのカウント値と精密位置センサのポジション値との絶対同期化のために、セグメントカウンタのウィーガンドワイヤの最後の磁化方向を情報の一部として使用して、カウント値とポジション値とを全ポジション値へとエラー無く変換するための方法およびこの方法を実行するための装置。
(もっと読む)
エンコーダホイール、ロータリエンコーダ、及び回転方向検出方法
【課題】本発明は、磁気式であっても、速度検出の精度を保ったまま、1つのセンサで回転方向を検出することのできるエンコーダホイール、ロータリエンコーダ、及び回転方向検出方法を提供する。
【解決手段】回転体の回転を検出するための磁気センサを備えて前記回転体の回転に対応したパルスを出力するロータリエンコーダのエンコーダホイール10において、前記磁気センサが対向したときに、高い電圧の前記パルスが出力されるアクティブ部1と、前記パルスが出力されないインアクティブ部2とが円周方向にそれぞれ複数配列された磁気パターンを有し、前記アクティブ部1の各々は、前記円周方向に略同幅に形成され、前記インアクティブ部2は、前記円周方向に幅の異なる第1インアクティブ部3、及び第2の幅で形成された第2インアクティブ部4を含み、回転方向により、前記アクティブ部1が前記磁気センサと対向するタイミングが異なるようにした。
(もっと読む)
回転検出機能付き転がり軸受装置
【課題】 容易に分解できて、転がり軸受かセンサ実装基板のいずれか等の不良発生部分のみを交換し、他の部分の再利用が可能な回転検出機能付き転がり軸受装置を提供する。
【解決手段】 転がり軸受1と、センサハウジング2と、エンコーダ3と、センサ実装基板4とを備える。転がり軸受1は、軸5の外周面に接する。センサハウジング2は環状であって、軸方向の一部である軸受嵌合部21に転がり軸受1の外輪12が嵌合し、軸受嵌合部21に対し軸方向にずれた部分であるエンコーダ収容部22の内周空間にエンコーダ3が収容される。エンコーダ3は、軸5と一体回転する。センサ実装基板4は、エンコーダ3を検出するセンサ42A,42B,42Cが実装され、エンコーダ収容部21とエンコーダ3間に設けられる。
(もっと読む)
エンコーダ
【課題】小型かつ高精度な位置検出が可能なエンコーダを提供すること
【解決手段】エンコーダにおいて、スケール20のパターン列はX方向に垂直なY方向に周期的に配列され、X方向にそれぞれ異なるピッチを有する複数の領域23A、25Aを有し、領域25Aのエネルギー分布の振幅がスケールのX方向の位置に従って変化するように構成されている。エンコーダは、受光素子アレイ16Aの出力信号からそれぞれ対応する領域の振幅を取得する第1、第2の振幅取得手段37、38と、第1、第2の振幅取得手段37、38が取得した複数の領域の2つの振幅の比で表される振幅信号S_ampをスケールの絶対位置を表す絶対位置信号として取得する位置情報取得手段34と、を有する。
(もっと読む)
エンコーダ
【課題】高精度なスケールの位置検出をすること
【解決手段】エンコーダにおいて、パターン列は、移動方向であるX方向に垂直なY方向に周期的に配列されたX方向に第1の変調周期P1と第2の変調周期P2を有する。信号処理手段30は、受光素子アレイの出力からピッチP1の位相を取得する第1の位相取得手段32を有する。エンコーダは、領域23を検出する複数の受光素子17Aの出力信号に対して受光素子アレイ上の位置に応じた重みを使用して重み付けをし、重みは、第1の位相取得手段の空間周波数応答のピッチP2に対応する空間周波数を含む所定の範囲において、重み付け有の値が重み付け無の値以下となるように設定されている。
(もっと読む)
アブソリュートエンコーダ装置及びモータ
【課題】組み付けが容易であり高分解能を達成する小型のアブソリュートエンコーダ装置を提供することを目的とする。
【解決手段】本発明は、第1の磁気パターン14(2極)と第2の磁気パターン16(多極)とを有する永久磁石4と、第1の磁気パターン14の磁界を検出する第1の磁気センサ5と、第2の磁気パターン16の磁界を検出する第2の磁気センサ6と、第1及び第2の磁気センサ5,6の出力信号から、回転軸2の絶対的な回転角度を算出する信号処理回路7とを備えるエンコーダ装置1であり、第1及び第2の磁気センサ5,6と信号処理回路7は単一基板8に固定され、第1の磁気パターン14は永久磁石4の内側において軸方向と交わる方向に延びる面上に形成され、第2の磁気パターン16は永久磁石4の外周面に形成される。
(もっと読む)
位置検出用スケールの計測装置、位置検出用スケールの計測方法、及びスケールの製造方法
【課題】位置検出用スケールの誤差を検出する精度を向上させる。
【解決手段】位置検出用スケールの計測装置は、位置検出に使用されるスケールの位置情報を検出する複数の検出部を有し、スケールに対して移動方向に相対的に移動する位置検出部と、複数の検出部のうち少なくとも2つの検出部による検出結果に基づいて、スケールの誤差を検出する誤差検出部と、を備える。そして、複数の検出部のうち少なくとも2つの検出部は、移動方向において互いに所定の第1間隔で配置されている。
(もっと読む)
鞍乗り型車両のホイールアセンブリ構造
【課題】ディスクプレートとパルサーリングとを共締めでリジッドマウントする場合にも、車輪速センサとパルサーリングの被検出部とが安定的な位置関係を維持することが可能な鞍乗り型車両のホイールアセンブリ構造を提供する。
【解決手段】パルサーリング26は、円環状の被検出部46の内縁から軸方向内側に折れ曲がるリブ部49を有し、該リブ部49がパルサーリング26の内縁全周にわたって設けられることで補強管部50が形成され、該補強管部50の軸方向の内側縁部から径方向内側に折れ曲がるフランジ部51が設けられ、当該フランジ部51が補強管部50の全周にわたって設けられることで補強円環部52が形成される。
(もっと読む)
回転運動または周回運動を検出する運動検出装置
【課題】被検出体の回転数等の計数を行う無電源の運動検出装置において、被検出体の回転数等の検出の正確性を損なうことなく、運動検出装置の小型化、軽量化、低コスト化を図る。
【解決手段】回転運動する可動部13の外周部にスタンバイ磁石15、17およびアウトプット磁石16を周方向に間隔Daをもって設け、可動部13の周囲に磁気センサ1、2、3を間隔Daよりも大きい間隔Dbをもって設ける。回転軸150の回転に伴い可動部13が回転する間、スタンバイ磁石15、17が磁気センサ1、2、3のうちのいずれかの磁気センサの近傍を通過すると、当該磁気センサがスタンバイ状態となり、スタンバイ状態となった磁気センサの近傍をアウトプット磁石16が通過すると、当該磁気センサの磁性素子21において大バルクハウゼン効果が生じ、コイル22から検出信号が出力される。この検出信号に基づいて回転軸150の回転数を計数する。
(もっと読む)
81 - 90 / 2,022
[ Back to top ]