
国際特許分類[G01L5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 力,応力,トルク,仕事,機械的動力,機械的効率,または流体圧力の測定 (8,098) | 特定の目的に適合した,力,例.衝撃によるもの,仕事,機械的動力またはトルクを測定する装置または方法 (2,038) | 力の複数分力を測定するもの (304)
国際特許分類[G01L5/16]に分類される特許
1 - 10 / 304
検出装置、電子機器及びロボット
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
センサ付車輪用軸受装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
検出装置、電子機器及びロボット
【課題】外力を高い精度で検出する検出装置を提供する事。
【解決手段】外力を検出する検出装置1は、基準点Pの周りに圧力センサー12を複数個配置した第一基板10と、突起22を有する第二基板20と、を備える。第一基板10は可撓性を有する。突起は22、基準点Pと重なる位置に重心Gが位置し、先端部が圧力センサー12に当接する様に配置されている。第一基板10が外力に応じて変形するので、外力の大きさと方向とを高い精度で検出する検出装置1を提供する事ができる。
(もっと読む)
検出装置、電子機器及びロボット

【課題】物体に作用する外力の方向及び大きさという力覚情報、及び外力が作用した物体の静止または滑りという滑り覚情報の複合情報を検出可能な検出装置を提供する。
【解決手段】検出装置100は検出部K及び演算部Eを有し、検出部Kでは外力が作用する側から順に、弾性基板Aと、感圧導電シート及び感圧導電シートの抵抗値を検出する一対の電極を有する滑り検出部Bと、剛性基板Cと、基準点の回りに複数配置された圧力センサーを有する第1基板及び外力によって先端部が第1基板に当接した状態で弾性変形する弾性体突起が形成された第2基板を有する外力検出部Dとが積層されている。検出装置100は、滑り検出部Bで物体の静止または滑りという滑り覚情報と、外力検出部Dで作用した外力の方向及び大きさという力覚情報とを同時に検出することができる。
(もっと読む)
センサー素子、力検出装置およびロボット
【課題】力検出装置に用いるセンサー素子の側面に配線層を形成することによって、配線スペースを小さくし小型の力検出装置を提供する。
【解決手段】α軸と、前記α軸に直交するβ軸と、前記α軸と前記β軸とに直交するγ軸とし、圧電基板と電極を、前記γ軸方向に積層して形成されるセンサー素子であって、前記電極の外形部の一部が前記圧電基板の外形部の一部に重なるよう配置される接続部を備え、前記γ軸の方向視において前記接続部が互いに重ならないように配置され、前記圧電基板の外周部の一部に、前記接続部と外部接続部とを電気的に接続する配線と、が形成されているセンサー素子。
(もっと読む)
検出装置、電子機器およびロボット
【課題】力の方向と大きさとを高い精度で検出することが可能な検出装置、電子機器およびロボットを提供する。
【解決手段】力の方向と大きさとを検出する複数の検出領域を有する第1基板と、基準点と重なる位置に重心が位置するとともに、力によって頂部が検出領域に当接した状態で弾性変形する弾性体突起が配置された第2基板とを備え、検出領域と、その隣り合う検出領域との間に検出領域が配置された第1基板面を基部として突き出す突起体を備える。
(もっと読む)
センサー素子、力検出装置およびロボット
【課題】高い感度の力検出を可能とするセンサー素子と、そのセンサー素子を用いたセンサーデバイスおよび力検出装置と、その力検出装置を備える高い信頼性と安全性を有するロボットを提供する。
【解決手段】三方晶系の単結晶より形成された圧電基板と、前記圧電基板の一方の基板面に配置される第1電極と、他方の基板面に配置される第2電極と、を備えるセンサー素子であって、前記圧電基板の前記基板面は、結晶軸のX軸(電気軸)を含み、前記基板面と、前記結晶軸の前記X軸(電気軸)とZ軸(光軸)とを含む面と、により成す角度θが、0°<θ<20°であるセンサー素子。
(もっと読む)
検出装置、電子機器、及びロボット
【課題】外力の有無を高速に検出し、且つ、外力の方向と大きさとを高い精度で検出する事が可能な検出装置、電子機器、及びロボットを提供する。
【解決手段】外力の有無を検出する第一機構31と、外力の大きさと方向とを検出する第二機構32と、を備え、第二機構32が形成される部位は窪んでいる。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外力の方向を高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された第1容量電極12を有する第1基板10と、第1容量電極を挟んで第1基板と対向配置された第2基板20と、第1基板と前記第2基板との間に配置された弾性体若しくは流体からなる誘電体と、第1基板と第2基板との間において誘電体を挟んで第1容量電極と対向配置された第2容量電極22と、基準点Pと重なる位置に重心が位置するとともに外力によって頂部が第2基板に当接した状態で弾性変形する円錐台または角錐台形状を有する弾性体突起32を備える。
(もっと読む)
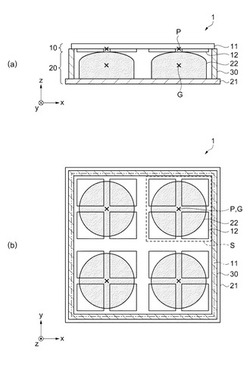
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及び
ロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する円錐台もしくは角錐台形状である弾性体突起22が形成された第2基板20とを備える。
(もっと読む)
1 - 10 / 304
[ Back to top ]