
国際特許分類[G01M17/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 機械または構造物の静的または動的つり合い試験;他に分類されない構造物または装置の試験 (8,636) | 車両の試験 (1,629)
国際特許分類[G01M17/00]の下位に属する分類
車輪付車両または無限軌道車両の (1,515)
鉄道車両の (108)
国際特許分類[G01M17/00]に分類される特許
1 - 6 / 6
車両衝突試験装置の牽引装置
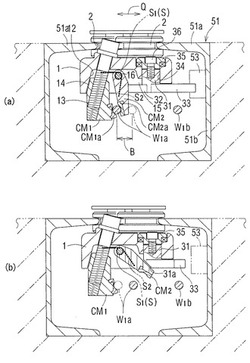
【課題】車両衝突試験装置において、牽引ワイヤロープと牽引装置の連結解除後におけるテスト車両の惰性走行距離を可能な限り短くして、当該テスト車両の衝突精度を高める。
【解決手段】フレーム1に固定される第1クランプ部材CM1と、当該第1クランプ部材CM1と協働して牽引ワイヤロープW1をクランプする第2クランプ部材CM2と、前記牽引ワイヤロープW1のクランプ及びその解除を行うためのレバー部材とから成るクランプ装置を有する車両衝突試験装置の牽引装置であって、前記第2クランプ部材CM2は、コイルバネSによりクランプの解除方向に付勢された状態で前記フレーム1に回動可能に支持され、クランプの解除時には、当該第2クランプ部材CM2は、前記コイルバネSの付勢力により、前記牽引ワイヤロープW1が第1及び第2のいずれのクランプ部材CM1,CM2に対しても接触しない距離を確保し得る角度だけ回動される構成とする。
(もっと読む)
太陽電池モジュールの耐久性試験装置

【課題】
太陽電池モジュールの機械的強度や耐久性、モジュールを枠体や支持金具を用いて屋根に取付けた実際の使用状態に近い環境での耐久性について自動的に試験できる太陽電池モジュールの耐久性試験装置を提供する。
【解決手段】
シール部5を除き周囲を剛性壁で囲まれた第1圧力室6と第2圧力室7とを備え、第1圧力室と第2圧力室は、一方の圧力室を構成する剛性壁に支持手段2にて取付けた太陽電池モジュール1と、圧力室を構成する剛性壁と太陽電池モジュールの周縁部間を気密状態に塞ぐシール部とで区画され、第1圧力室と第2圧力室とにそれぞれ接続された第1給排気手段8と第2給排気手段9とにより、第1圧力室と第2圧力室とを所定圧力に加減圧することで太陽電池モジュールの表裏両面に圧力差を発生させ、実環境で太陽電池モジュールに作用する風圧を再現する。
(もっと読む)
車両性能試験装置の車輪センタリング装置
【課題】従来の接触(圧力)センサを使用したセンタリング装置は車輪の材質や空気圧等によって検出位置にバラつきが生じる。
【解決手段】車輪センタリング装置1は、シャシーダイナモメータの一軸ドラム103の軸心を通る鉛直線の前後に配置された前後一対のローラ2,2と、ローラ2をローラホルダ3によりロッド4の先端部に取り付けた前後一対の電動シリンダ5,6と、上記ローラ2と共に上記ローラホルダ3に取り付けられていて試験車両の駆動輪102を検出する駆動輪検出センサ7と、前後一対の電動シリンダ5,6の駆動を制御する制御装置と、を備えている。上記駆動輪検出センサ7に光電センサを使用した。
(もっと読む)
車両の車輪固定装置
【課題】駆動輪をローラに乗せて従動輪の位置が決定された後に、従動輪の前後を前後一対の車輪受けで挟着して従動輪を固定する。
【解決手段】車輪固定装置1は、ベースプレート4と、ベースプレートに設けられた一対の車輪受け2、2と、これら一対の車輪受けを車輪の前後方向に移動させる車輪受け駆動機構6と、を備えている。一対の車輪受けの間に、これら一対の車輪受けの先端側から車輪を導入可能な車輪導入空間部3を設け、該車輪導入空間部に、前記車輪の外面側から該車輪を挿入し、前記一対の車輪受けを車輪受け駆動機構6で前記車輪に向けて移動させることにより、該車輪の周面の前後を前記一対の車輪受けで挟着固定した。前記ベースプレートに床面上を走行させるキャスター等の走行補助具5を設けた。
(もっと読む)
事故車の修理費用計算装置
【目的】 事故車の塗装の修理をするにあたって、その修理費用の見積りなどの計算を簡便な作業で、しかも正確に行うことができるようにすること。
【構成】 CD−ROMなどの記録媒体1に、(a)塗色の種類と、塗料の種類との複数の組合せと、(b)各組合せに含まれる塗装作業項目と、(c)それらの塗装作業項目に個別的に対応した修理費用の値とをストアする記録媒体1と、記録媒体1のストア内容を読出して表示し、(a)前記組合せと、(b)塗装作業項目とを選択する第1手段と、選択された(a)前記組合せと、(b)塗装作業項目とに個別的に対応した前記値を演算して修理費用を求める第2手段とを含む。
(もっと読む)
クラツチ試験装置
【目的】 駆動エンジンの出力トルクを加算して実際の車両状態を模擬できると共に、1つの装置によりドライブ条件及びコースティング条件の両方の条件の模擬試験を行うことができ、しかも、正確で効率的に模擬試験を行なうことができるクラッチ試験装置の開発。
【構成】 車両負荷を模擬した駆動モータ2と、駆動エンジンを模擬した低慣性駆動・吸収装置3と、クラッチ1を締結・解放するピストン4と、駆動モータ2を、回転数制御可能に形成され、一方、低慣性駆動・吸収装置3を、クラッチ解放状態では回転数制御し、クラッチ締結状態ではトルク制御するようピストン4の作動に連動制御可能に形成され、かつ、ピストン4を、クラッチ締結作動開始後クラッチ1が完全に締結されるのに必要な所定時間が経過したらピストン4を自動解放制御可能に形成されている駆動制御回路5とを設けた。
(もっと読む)
1 - 6 / 6
[ Back to top ]