
国際特許分類[G01M17/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 機械または構造物の静的または動的つり合い試験;他に分類されない構造物または装置の試験 (8,636) | 車両の試験 (1,629) | 車輪付車両または無限軌道車両の (1,515) | 操縦性の;ローリングの (57)
国際特許分類[G01M17/06]に分類される特許
1 - 10 / 57
ヨー応答ゲインの評価方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
応答遅れ評価方法
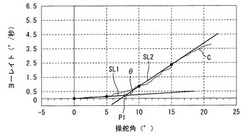
【課題】評価者の能力に関わらず、バラツキが少ない信頼性の高い評価結果が得られる応答遅れ評価方法を提供すること。
【解決手段】ヨーイングを含む走行時の車両の、操舵角とヨーレイトとの関係を示すグラフを得るステップと、このグラフにおける、操舵角とヨーレイトとの対応を示すカーブCの曲率が大きく変化する点である変化点PIの位置から、応答遅れを判断するステップとを含んでいる。上記カーブCの変化点PIの位置における操舵角の値を応答遅れの指数とし、上記変化点PIが、上記カーブCにおける、操舵角の5度以下の2点間を結ぶ第一直線SL1と、8度以上の2点間を結ぶ第二直線SL2との交差点であり、上記第一直線SL1と第二直線SL2との交差角θが、定められた閾値未満の場合は応答遅れ無しとし、この閾値以上の場合は応答遅れ有りとするのが好ましい。
(もっと読む)
移動体回転半径測定装置及び方法

【課題】移動体の回転半径を、精度が高く、かつ、労力や時間がかからずに測定する移動体回転半径測定装置及び方法を提供すること。
【解決手段】移動体回転半径計測装置10は、GPS受信機101が受信したGPS搬送波と、IMU102が出力したデータとをカルマンフィルタにより処理することで速度を算出し、算出した南北方向の速度を積算して南北方向の移動距離を算出し、算出した東西方向の速度を積算して東西方向の移動距離を算出し、算出した移動距離に基づいて算出される移動軌跡から、回転半径を算出する。
(もっと読む)
車両評価システム
【課題】ドライバが恐いと感じる異常な車両挙動が発生したときの車両の運転状態を評価する車両評価システムを提供する。
【解決手段】シミュレータ20には、複数のシミュレータ22からなるHILSが使用されており、フレームカー50には実際のECU、アクチュエータ等が搭載されている。シミュレータ20に設定されている人間モデル40は、シミュレータ20が実現する車両モデルとフレームカー50とで構成される仮想車両4の車両挙動に対して、ドライバが恐いと感じるか否か、恐いと感じる場合には恐さの程度を出力するモデルである。オペレーションPC10から設定された試験条件に基づいてシミュレータ20およびフレームカー50が仮想車両4として作動し、そのときの車両挙動に対して人間モデル40が恐いと出力すると、シミュレータ20は、そのときの恐さのレベルと、仮想車両4の運転データとを記憶する。
(もっと読む)
車両のロール感を評価する方法
【課題】精度良くかつ定量的に車両のロール感を評価する。
【解決手段】車両1を旋回させて、車両のロール感を評価する。車両1の中立状態から一方側に実舵角α°で旋回させた後、他方側に実舵角−α°で旋回させ、さらに前記中立状態まで旋回する旋回工程と、前記旋回工程中の車両のロール量の時間変化を示すロール波形を求める計測工程と、前記ロール波形からロール感を評価する評価工程とを含む。前記評価工程は、前記ロール波形から、一方側の最大ロール位置R1、他方側の最大ロール位置R2、及び、前記ロール波形を2回微分したときの解が0であるロール変曲点R3を求める。一方側の最大ロール位置R1からロール変曲点R3までの走行時間t1と、ロール変曲点R3から他方側の最大ロール位置R2までの走行時間t2との比t1/t2に基づいてロール感を評価する。
(もっと読む)
車輪代替部材、操舵反力伝達部材および操舵反力伝達装置
【課題】本発明は、運転の模擬の対象として運転模擬装置に組み込まれる自動車、オートバイ等の実車の操舵系に対するその模擬に応じた操舵反力の伝達に供される車輪代替部材、操舵反力伝達部材および操舵反力伝達装置に関し、模擬の対象となる車両に施されるべき改造の大幅な軽減が図られ、かつ多様な車種に対する柔軟な適応を可能とすることを目的とする。
【解決手段】自動車の車輪に代えて前記自動車に取付可能に構成され、かつ前記自動車に関して模擬された操舵反力を前記車輪の軸に与えることによって構成される。
(もっと読む)
自転車操縦性評価方法及び自転車操縦性評価装置
【課題】自転車の「乗り心地」や「操縦安定性」などの操縦性を客観的な指標に基づいて評価する。
【解決手段】自転車が路面を走行する際に乗員から取得可能な信号を用いて自転車の操縦性を評価する自転車操縦性評価方法であって、乗員の後頭部に国際法10−20法に基づいて配置された電極から電気信号を取得する信号取得工程S1と、取得された電気信号からMidα、Fastα、及びβ波に相当する周波数帯成分のスペクトルを抽出する信号解析を実行する解析工程S21と、路面を走行する基準自転車を操縦する被験者の後頭部に国際法10−20法に基づいて配置された電極から取得された電気信号と、被験者によって入力された基準自転車の操縦性を評価する評価値とに関連付けられた基準に基づいて、自転車の操縦性を評価するための複数のカテゴリーのいずれかに抽出されたスペクトルを分類する分類工程S23と、を有する。
(もっと読む)
操縦感覚評価システムおよび操縦感覚評価方法
【課題】操縦感覚の評価を客観的に行い得る操縦感覚評価システムおよび操縦感覚評価方法を提供すること。
【解決手段】この操縦感覚評価システム1は、ステアリングホイール10の回転径方向に所定の基準軸Zoをとるときに、運転者によるステアリングホイール10の操作によってステアリングホイール10に作用する基準軸Zo廻りのモーメントMzを取得するモーメント取得手段(操作力検出装置2および制御装置4のモーメント算出部41)と、操縦感覚の評価対象となる評価区間Sについて、モーメントMzにかかる操舵意図特徴量を算出する操舵意図特徴量算出手段(制御装置4の操舵意図特徴量算出部42)とを備える。
(もっと読む)
車両の操縦安定性能試験方法及び操縦安定性能試験装置
【課題】種々の走行状態を再現する内、最も再現性が困難なスラローム状態の操縦安定性能の評価を可能とする車両の操縦安定性能試験方法及び操縦安定性能試験装置を提供する。
【解決手段】車両の周期的な連続進路転換時における操縦安定性能を試験する方法であって、複数の加振機を個別に制御する加振コントローラは、左右いずれか一方の前輪に対応する加振機の加振開始時点よりも、一方の前輪側の後輪に対応する加振機の加振を半周期遅れ、かつ、加振波形が半周期進んだ時点から開始し、他方の前輪に対応する加振機の加振を一方の前輪に対応する加振機の加振開始時点と同時に、かつ、加振波形が半周期進んだ時点から開始し、他方の前輪の加振開始時点よりも、他方の前輪側の後輪に対応する加振機の加振を半周期遅れ、かつ、加振波形が半周期遅れた時点から開始するようにした。
(もっと読む)
車両の挙動を特徴付けて向上させる方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
1 - 10 / 57
[ Back to top ]