
国際特許分類[G01N21/84]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 材料の化学的または物理的性質の決定による材料の調査または分析 (128,275) | 光学的手段,すなわち.赤外線,可視光線または紫外線を使用することによる材料の調査または分析 (28,618) | 特殊な応用に特に適合したシステム (7,977)
国際特許分類[G01N21/84]の下位に属する分類
動いている流体または動いている粒状固体の調査 (321)
動いているシートの調査 (23)
宝石の調査 (17)
きず,欠陥,または汚れの存在の調査 (6,670)
国際特許分類[G01N21/84]に分類される特許
101 - 110 / 946
位置合わせ装置、位置合わせ方法および位置合わせプログラム
【課題】撮像した検査対象の画像が、検査領域から外れた場合であっても、検査対象の位置合わせにかかる検索時間を短縮して、検査時間の増大を抑制することができる位置合わせ装置、位置合わせ方法および位置合わせプログラムを提供すること。
【解決手段】検査測定のための基板画像を撮像する撮像部と、検査測定を行う測定箇所が設定された高倍レシピ画像、および高倍レシピ画像と比して広範囲な視野領域を有する低倍レシピ画像を記憶する記憶部と、高倍レシピ画像と同等の倍率の検査画像の低倍レシピ画像内の位置を検索する検索部と、検索の結果、検査画像の視野領域内から測定箇所が外れている場合、検査画像および測定箇所の位置を含む位置情報を算出する算出部と、算出部が算出した位置情報をもとに、検査画像の視野領域内に測定箇所が入るように撮像部を移動した後、検査画像を撮像させる制御部と、を備えた。
(もっと読む)
多重測定を使用して表面特性を決定するための装置および方法

【課題】高反射性面の表面特性測定に適した装置および
方法を提供する。
【解決手段】測定面(10)は少なくとも1つの放射線装置(2)によって照射され、測定面で散乱された前記放射線のうち少なくとも1つの測定信号を出力する少なくとも1つの第1の放射線検出装置(4)とを備え、前記測定面(10)の光沢度測定を実施するための第2の放射線装置(12)と第2の放射線検出装置(14)とを含む。前記第2の放射線装置(12)は、前記測定面(10)に所定の入射角(a)で放射を行い、前記第2の放射線検出装置(14)は少なくとも前記第2の放射線装置(2)によって照射され、その後に、前記測定面(10)から反射された前記放射線の少なくとも一部を受信する。本発明によれば、前記第2の放射線装置(12)が前記測定面に放射するにあたり、前記測定面(10)に垂直な方向(M)に対して形成される前記入射角(a)が50°以下である。
(もっと読む)
スポット溶接検査方法および装置
【課題】広範囲領域でのスポット溶接の有無、およびスポット溶接位置の検査を可能とするスポット溶接検査方法および装置を提供する。
【解決手段】スポット溶接を施した溶接母材に対して斜光を照射する第1の投光機と、上方から溶接母材の画像を取得する撮像機と、第1の投光機および撮像機を搭載し、溶接母材に対する位置調整可能な走査装置と、撮像機からの画像情報を処理する処理装置から構成され、処理装置は、撮像機から得られた3階層レベルの輝度の第1の画像から、中間輝度レベルと中間輝度レベル以外の輝度の2階層レベルの輝度で構成された第2の画像を得、中間輝度レベル以外の輝度の部分をスポット溶接のエッジ部分とする第1の手段、第1の手段によるエッジ部分からスポット溶接の中心位置を決定する第2の手段を備える。
(もっと読む)
ハニカム構造体の検査方法及びハニカム構造体の検査装置
【課題】ハニカム構造体のセル内の隔壁の欠陥を検出することが可能なハニカム構造体の検査方法を提供する。
【解決手段】一方の端面から他方の端面まで貫通する複数のセルを区画形成する多孔質の隔壁を有するハニカム構造体100を検査対象とし、ハニカム構造体100の一方の端面11を、一方の端面11との角度θが0°より大きく90°より小さくなる方向から、撮像装置21で撮像して、ハニカム構造体100のセル内の隔壁の欠陥を検査するハニカム構造体の検査方法。
(もっと読む)
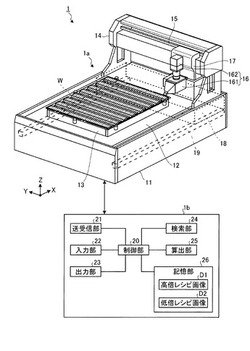
基板検査装置
【課題】剥離帯電によって発生する静電気の量を低減することができ、基板の平面度が出し易い基板検査装置を提供すること。
【解決手段】検査対象の基板Sを下面から照明する透過照明ユニット4と、基板の上面に沿って移動され、基板の像を結像する顕微鏡8とを備えた基板検査装置1は、透過照明ユニットの上面に、柱状をなし、互いに所定の間隔をおいて互いの軸線と平行に複数立設され、基板を支持すると共に、軸線方向に沿った長さを調整自在な支持部材5を有する。
(もっと読む)
動画像撮像装置、動画像観察方法、動画像観察プログラム及びコンピュータで読取可能な記録媒体
【課題】被写体の周期的な動きを撮影し、その各周期の動きを評価しながら、通常とは異なる画像のみを記録可能とする。
【解決手段】画像取得手段で取得した入力動画像を保持する一次記憶手段53と、被写体の基準となる動きを表す、基準動きパターンを取得する基準動きパターン取得手段37と、入力動画像の各フレームを、基準動きパターンの各フレームから計算される評価用データと比較することで、入力動画像と基準動きパターン同士の各フレームの異常度を算出し、これに基づいて入力動画像と基準動きパターン同士の全体の異常度を演算する異常度解析手段38と、異常度解析手段38で演算された異常度に基づき、異常度の高いフレームから順に一次記憶手段53に残し、一次記憶手段53の空きがなくなったら異常度の低いフレームから順に削除する保存画像抽出手段36とを備える。
(もっと読む)
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
検査装置の給電装置
【課題】被測定物に対し電流を流して検査する検査装置を被測定物の製造ラインに投入する場合において、被測定物の検査のための待ち時間の大幅な短縮を図り、全体としての検査時間(タクトタイム)を短縮することを可能とする検査装置用の給電装置を提供する。
【解決手段】被測定物200に電流を流すことで検査を行う検査装置において使用する給電装置を、検査装置側に給電手段を設け、被測定物側に集電手段を設けることにより、被測定物200が検査装置に搬入される際に、給電手段と集電手段を電気的に接続させる構成とした。
(もっと読む)
追跡ロボット装置、追跡ロボット制御方法、追跡ロボット制御プログラム、ホモグラフィー行列取得装置、ホモグラフィー行列取得方法、およびホモグラフィー行列取得プログラム
【課題】リアルタイム性を確保し且つ安定性の高いトラッキングを行う。
【解決手段】ホモグラフィー行列取得装置30は、撮像装置11が出力する画像データを取り込む。ホモグラフィー行列取得装置30は、画像データごとに局所的ホモグラフィー行列を計算し、また、その計算レートよりも低いレートで、大域的ホモグラフィー行列を計算する。ホモグラフィー行列取得装置30は、画像データごとに、局所的ホモグラフィー行列を用いて画像データを変換し、参照画像との相関を求める。相関が高い場合は、当該画像データに対応して計算した局所的ホモグラフィー行列が読み出されるように制御する一方、相関が低い場合は、最新の大域的ホモグラフィー行列が読み出されるように制御する。ロボット制御装置45は、ホモグラフィー行列取得装置30からホモグラフィー行列データを読み込んでロボット本体12の姿勢を計算し動作を制御する。
(もっと読む)
検査装置用照明システム
【課題】検査装置における照明装置の煩雑・且つ経験や勘に頼る非効率、不確実な調整作業を軽減し、論理的に最適化し、検査における生産性を向上させ、結果として不良率を下げ、稼働率を上げる。
【解決手段】センシングの為のカメラやセンサ200,201を備えた、検査装置に於いて、単色〜主に多色、異波長の光源を備えた照明100と100を複数軸方向に可動する機能102、103、104、場合により専用受光センサ107を備えた照明部分とそのコントローラ101とPC用ソフトウエア105を考案し、照明100の発光色、発光波長、発光光量、照射距離/範囲、照射角度、などを能動的に変化させ、記憶し、呼び出し、比較し、判断する機能を有する。
(もっと読む)
101 - 110 / 946
[ Back to top ]