
国際特許分類[G01P21/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | このサブクラスの他のグループに包含される装置または器具の試験または較正 (327)
国際特許分類[G01P21/00]の下位に属する分類
速度計に関するもの (109)
国際特許分類[G01P21/00]に分類される特許
11 - 20 / 218
感度温特補正回路
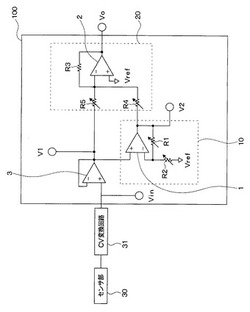
【課題】出力信号の感度温度係数を低減することができる感度温特補正回路を提供する。
【解決手段】センサ部30から物理量に応じた検出信号が入力されると共に可変抵抗R2を介して基準電圧が入力される第1オペアンプ1を有し、第1オペアンプ1に可変抵抗R2と抵抗温度係数の異なる帰還抵抗としての可変抵抗R1が接続されて構成される第1感度温特調整部10と、第1感度温特調整部10から出力された出力信号が入力される第2オペアンプ2を有し、第2オペアンプ2に接続される帰還抵抗R3と、第2オペアンプ2の入力端子に接続されると共に第1オペアンプ1の出力端子に接続され、第2オペアンプ2に接続された帰還抵抗R3と抵抗温度係数の異なる可変抵抗R4と、を有する第2感度温特調整部20と、を備える。
(もっと読む)
加速度検出方法、位置算出方法及び加速度検出装置

【課題】移動体の加速度をより適切に検出するための新しい手法の提案。
【解決手段】姿勢調整部20は、移動体に設置された姿勢センサー4の検出姿勢を、移動体に設置された加速度センサー3の検出加速度ベクトルと移動体の移動に係る所与の参照ベクトルとを用いて調整する。そして、座標変換部30は、姿勢調整部20により調整された検出姿勢を用いて、移動体のローカル座標系から絶対座標系への座標変換に係る変換係数を求め、当該変換係数を用いて、加速度センサー3の検出加速度ベクトルを絶対座標系における加速度ベクトルに座標変換する。
(もっと読む)
多軸慣性力印加装置
【課題】単軸加振機(単軸慣性力発生器)で三軸方向に振動及び回転の印加が可能な多軸慣性力印加装置を提供する。
【解決手段】下部支持板110と、下部支持板110から立ち上がるように固定された第1支持部材120と、第1支持部材120に立ち上がり方向に直交するように位置し、第1支持部材120に回転可能に結合された第2支持部材130と、第2支持部材130に積層され、積層方向に対応する回転軸を中心に回転できるように第2支持部材130に結合された第3支持部材140と、を含む。
(もっと読む)
車両制御装置
【課題】低コストの構成で、ロックアップクラッチの作動時に、車速変化から算出される加減速度がロックアップクラッチ作動ショックにともなう誤差を極力含まないようにする。
【解決手段】ロックアップクラッチを有するトルクコンバータ5を備えたアイドルストップ車1の車輪速センサ18によりアイドルストップ車1の車速を検出し、アイドルストップ制御部11の算出手段により車輪速センサ18が検出した車速の変化から加減速度を算出し、アイドルストップ制御部11の抑制手段により前記車速の変化の変動を抑制し、車速変化から算出される加減速度がロックアップクラッチ作動ショックにともなう誤差を極力含まないようにする。
(もっと読む)
撮像装置、光学機器および該撮像装置もしくは光学機器に備えられた加速度センサの出力補正方法
【課題】 加速度センサを備えた撮像装置であって、環境(特に温度)が変化した場合には、加速度センサの出力に含まれるオフセット成分を調整することで手間がかかっていた。
【解決手段】 撮像装置は、光軸に直交し、互いに直交する第1の検出軸と第2の検出軸を少なくとも有する、装置に加わる振れを加速度として検出する加速度センサと、前記光軸周りに装置を回転させた際の、前記加速度センサの出力の最大値と最小値を取得する取得手段と、前記取得手段によって取得された前記最大値と最小値を用いて、前記加速度センサの出力に加わるオフセット成分を算出するオフセット算出手段と、前記加速度センサの出力の前記オフセット成分を補正し、該補正された前記加速度センサの出力に基づいて前記装置の傾斜度合を検出する傾斜検出手段とを有する。
(もっと読む)
加速度センサ特性評価装置
【課題】回転軸をずらした互いに反対方向に回転する大回転テーブル及び小回転テーブルを設けた加速度センサ特性評価装置においては、大回転テーブル及び小回転テーブルの慣性モーメント及び摩擦力は位相に依存して変化していたために、加速度センサの高精度の2軸同時測定が不可能であった。
【解決手段】加速度センサ1を固定する正三角状のテーブル2の各頂点に、同一長さrのリンク3−1、3−2、3−3が接続されている。リンク3−1、3−2、3−3は互いに平行であり、矢印R1、R2、R3に示すごとく、これらの回転軸4−1、4−2、4−3に対して無限回転可能である。ベアリングの偏り等を無視すれば、テーブル2の慣性モーメント、摩擦力は位相に依存せずに一定となり、テーブル2つまり加速度センサ1は外界に対して姿勢を保持した状態で、矢印R0に示すごとく、リンク3−1、3−2、3−3の長さrを半径とする完全な等速円運動が可能となる。
(もっと読む)
物理量検出装置、ネットワークシステム
【課題】センサ検出結果を送信するための通信負荷を軽減するとともに、センサ検出結果を受信する受信装置の処理負荷を軽減することのできる、物理量検出装置を提供することを目的とする。
【解決手段】本発明に係る物理量検出装置は、センサが正常に稼動していない場合にはセンサの検出結果を送信せずにその診断結果を送信する。
(もっと読む)
車両用制御装置
【課題】ヨーレートセンサの異常判定に用いる閾値の設定を容易にするとともに、誤判定を確実に防止することを目的とする。
【解決手段】車両用制御装置は、実ヨーレートの変化率が所定値以上である場合に実ヨーレートが急変したと判定する急変判定を行った場合には、急変判定前にヨーレートセンサで検出された実ヨーレートに対応した値と、急変判定後にヨーレートセンサで検出された実ヨーレートに対応した値との差である第1の偏差を算出するとともに、急変判定前に位置補正をして算出した推定横加速度に対応した値と、急変判定後に位置補正をして算出した推定横加速度に対応した値との差である第2の偏差を算出し、第1,第2の偏差の符号が互いに正負逆である場合に(ステップS14:Yes)、ヨーレートセンサが異常であると判定する。
(もっと読む)
物理量センサの検査方法および物理量センサの製造方法
【課題】物理量センサに対応した個別の通信インタフェイスを用いることなく複数の物理量センサを区別すると共に複数の物理量センサを一括して検査する。
【解決手段】検査前に、複数の物理量センサ10のマイコン(フラッシュROM11)に、複数の物理量センサ10それぞれを区別する識別情報が含まれた検査用プログラムを書き込む。続いて、検査用プログラムが書き込まれた複数の物理量センサ10を同一の通信線40にそれぞれ接続する。また、通信線40を検査機器20に接続する。そして、検査機器20の指令によって検査用プログラムを実行させることで複数の物理量センサ10をそれぞれ検査する。この後、検査機器20によって、複数の物理量センサ10のマイコン(フラッシュROM11)にそれぞれ書き込まれた検査用プログラムを、物理量の検出に用いられる製品プログラムに書き換える。
(もっと読む)
加速度検出装置
【課題】 補正精度の低下を抑制できる加速度検出装置を提供する。
【解決手段】 加速度検出装置12は、停車状態から走行状態へ移行する際のN制御抜け時加速度Goutに基づく補正量(補正値Gdの絶対値)によりセンサ信号Gsen値のゼロ点位置を補正するゼロ点補正部21と、補正量を制限する補正量制限部20と、を備える。
(もっと読む)
11 - 20 / 218
[ Back to top ]