
国際特許分類[G01P21/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | このサブクラスの他のグループに包含される装置または器具の試験または較正 (327) | 速度計に関するもの (109)
国際特許分類[G01P21/02]に分類される特許
1 - 10 / 109
ジャイロ校正のための2回転軸直交ダブルターンテーブル
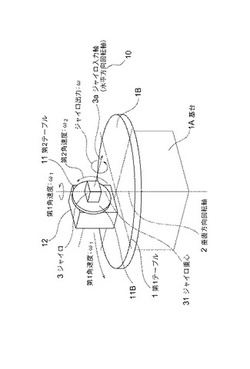
【課題】本発明は、第1テーブル上に、この第1テーブルの垂直方向回転軸とは直交する水平方向回転軸を有する第2テーブルを設けたダブルターンテーブルを得ることを目的とする。
【解決手段】本発明によるジャイロ校正のための2回転軸直交ダブルターンテーブルは、基台(1A)に設けられた垂直方向回転軸(2)に設けられた第1テーブル(1)と、前記第1テーブル(1)上に設けられ、前記垂直方向回転軸(2)に対して直交する水平方向回転軸(10)に設けられた第2テーブル(11)と、を備え、前記各テーブル(1,11)の各テーブル面(1B,11B)は互いに直交している構成である。
(もっと読む)
補正装置、補正方法及び補正装置用プログラム

【課題】例えば測位電波が受信できない状態において、道路の状態に応じて例えば加速度センサ等のセンサの機能に誤差が生じる場合でも、正確に当該誤差を補正することが可能な補正装置を提供する。
【解決手段】車両に印加されている加速度を検出し、加速度データを生成する加速度センサ1と、加速度データを用いて速度を算出する速度算出部2と、現在位置を検出する位置検出部3と、現在位置に対応する道路の半径データを取得する取得部4と、進行方位を検出するジャイロセンサ5と、進行方位の変化量を算出する変化量算出部6と、道路データと進行方位の変化量とを用いて補正用速度を算出する補正用速度算出部7と、補正用速度を用いて速度算出部2を補正する補正部8と、を備える。
(もっと読む)
角速度検出装置及び角速度のエラー検出方法
【課題】 ノイズに伴う角速度変化に対しては、エラー検出せずに、故障による角速度の異常変化をノイズと区別してエラー検出することが可能な角速度検出装置及び角速度のエラー検出方法を提供することを目的としている。
【解決手段】 本実施形態の角速度検出装置は、プラスカウンターでは、「時間」ごとに算出した平均角速度「ASMAV(deg/s)」が、例えば、3000(deg/s)以上であるときに、3を加算するとともに3000よりも小さいときに、1を減算して第1のカウンター値Pを求める。マイナスカウンターでは、前記平均角速度「ASMAV(deg/s)」が、例えば、−3000(deg/s)以下であるときに、3を加算するとともに−3000よりも大きいとき、1を減算して第2のカウンター値Mを求める。各カウンター値が所定のエラー閾値(例えば20)を越えたときにエラーと判断される。
(もっと読む)
容量式物理量検出装置
【課題】反りによる物理量の検出精度の低下を抑制することができる容量式物理量検出装置を提供する。
【解決手段】物理量の印加によって静電容量が変化する容量部と、該容量部の出力信号を処理する処理部と、温度を検出する検温部と、を有するセンサチップを備え、検温部は、センサチップにおける、センサチップの中心をその厚さ方向に貫く中心線が通過する位置に形成された第1検温素子と、中心線と直交する直交方向において、第1検温素子から所定距離離れた位置に形成された第2検温素子と、を有し、容量部は、直交方向に沿う検出方向に可動する可動電極と、該可動電極と検出方向にて対向する固定電極と、を有し、処理部は、第1検温素子の出力信号と第2検温素子の出力信号とに基づいて、熱によるセンサチップの反りを算出し、算出した反りに基づいて、容量部の出力信号を補正する補正回路を有する。
(もっと読む)
物理量センサの検査方法および物理量センサの製造方法
【課題】物理量センサに対応した個別の通信インタフェイスを用いることなく複数の物理量センサを区別すると共に複数の物理量センサを一括して検査する。
【解決手段】検査前に、複数の物理量センサ10のマイコン(フラッシュROM11)に、複数の物理量センサ10それぞれを区別する識別情報が含まれた検査用プログラムを書き込む。続いて、検査用プログラムが書き込まれた複数の物理量センサ10を同一の通信線40にそれぞれ接続する。また、通信線40を検査機器20に接続する。そして、検査機器20の指令によって検査用プログラムを実行させることで複数の物理量センサ10をそれぞれ検査する。この後、検査機器20によって、複数の物理量センサ10のマイコン(フラッシュROM11)にそれぞれ書き込まれた検査用プログラムを、物理量の検出に用いられる製品プログラムに書き換える。
(もっと読む)
航空機の対気速度センサシステム
【課題】異なる有利な実施形態により、航空機の対気速度を識別する装置及び方法を提供する。
【解決手段】この装置は、複数のピトー静圧管108からなる。複数のピトー静圧管は第1データを生成する。この装置はまた、複数の迎え角センサシステム110からなる。複数の迎え角センサシステムは第2データを生成する。この装置はまた、複数の光検出及び測距センサ112からなる。光検出及び測距センサは第3データを生成する。この装置はまた、複数のピトー静圧管から生成された第1データ、複数の迎え角センサシステムから生成された第2データ、及び複数の光検出及び測距センサから生成された第3データのエラーを検出する信号統合システムからなる。
(もっと読む)
故障検知装置、故障検知方法、及び倒立移動体。
【課題】故障したセンサを簡便に特定することができる故障検知装置、故障検知方法、及び倒立移動体を提供すること。
【解決手段】本発明の一態様にかかる故障検知装置は、倒立移動体に設けられたジャイロセンサの故障を検出する故障検知装置であって、第1の軸周りの第1の方向の角速度を検出して、第1検出信号を出力する第1のピッチセンサ111と、第1の軸周りの第1の方向と反対の第2の方向の角速度を示す第2検出信号を出力する第2のピッチセンサ112と、第1の軸周りの第1の方向の角速度を示す第3検出信号を出力する第3のピッチセンサ211と、第1検出信号と第2検出信号との比較結果に基づいて故障を検知し、第1検出信号乃至第3検出信号を用いて、第1乃至第3のピッチセンサのうち故障しているセンサを特定するCPU121と、を備えたものである。
(もっと読む)
ヨーレート検出装置
【課題】車両の走行状態にかかわらずにヨーレートセンサの較正を適切に行なう。
【解決手段】ヨーレート検出装置10は、車両の位置が所定精度以上で車両のヨーレートを算出可能なヨーレート算出範囲内に存在するか否かを判定するヨーレート算出範囲判定部23aと、車両の現在位置がヨーレート算出範囲内に存在するとヨーレート算出範囲判定部23aにより判定された場合に、車両の位置と道路データ記憶部22に記憶されている曲率情報とに基づき、車両のヨーレートを算出して算出値を出力するヨーレート算出部31と、ヨーレート算出部31から出力されたヨーレートの算出値と、ヨーレートセンサ11から出力されるヨーレート(検出値)Ysとの差に基づき、ヨーレート(検出値)Ysを補正し、該補正により得られる算出値を出力するヨーレートセンサ補正部38とを備える。
(もっと読む)
ヨーレート補正装置
【課題】移動中にヨーレートの検出値を補正するときの補正精度を向上させる。
【解決手段】ヨーレート補正装置10は、操舵角センサ13と、ヨーレートセンサ11と、操舵角の検出値に基づき基準ヨーレートを算出する基準ヨーレート算出部21と、ヨーレートの検出値と基準ヨーレートとの差からオフセット値を算出するオフセット値算出部24と、オフセット値によりヨーレートの検出値を補正する補正部31と、基準ヨーレートの微分値とヨーレートの検出値の微分値との差が所定範囲外の場合にヨーレートの検出値の補正を禁止する補正判定部30とを備える。
(もっと読む)
ナビゲーション装置
【課題】カメラからの映像を、地図情報と自車位置とのマップマッチング以外の用途にも利用することが可能なナビゲーション装置を提供する。
【解決手段】自車両の周辺を撮像し撮像信号を出力するリアカメラ24と、自車両の走行状態を表す信号を出力する振動ジャイロ14aおよび速度センサ14bと、リアカメラ24が出力する撮像信号に基づいてキャリブレーション情報を演算する演算部35と、キャリブレーション情報に基づいて、振動ジャイロ14aおよび速度センサ14bのキャリブレーションを行うキャリブレーション部36とを備えるナビゲーション装置。
(もっと読む)
1 - 10 / 109
[ Back to top ]