
国際特許分類[G01P3/36]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 直線速度または角速度の測定;直線速度の差または角速度の差の測定 (1,568) | 光学的手段の使用によって特徴づけられた装置,例.赤外線,可視光線または紫外線の使用 (184)
国際特許分類[G01P3/36]の下位に属する分類
写真式手段を用いるもの (2)
ストロボ式手段を用いるもの (3)
国際特許分類[G01P3/36]に分類される特許
1 - 10 / 179
速度検出装置、移動部材搬送ユニット、及び、画像形成装置
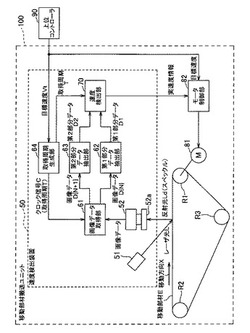
【課題】移動部材の実速度を短時間で精度良く検出できる速度検出装置、その速度検出装置を有する移動部材搬送ユニット、及び、その移動部材搬送ユニットを有する画像形成装置を提供する。
【解決手段】速度検出装置50は、移動部材Eにおけるレーザ光Lが照射された箇所を撮影した画像データDを取得周期T毎に取得して、一の画像データD{N}の画像G{N}における一部分領域A1に対応する第1部分データD1を抽出し、他の画像データD{N+1}の画像G{N+1}における上記一部分領域A1の下流側にある他部分領域A2に対応する第2部分データD2を抽出し、これら第1部分データD1及び第2部分データD2に基づいて移動部材Eの実速度Vrを検出する。また、取得周期Tが、移動部材Eの目標速度Vtを上記一部分領域A1と上記他部分領域A2との相対距離Hで除した値に基づいて設定されている。
(もっと読む)
移動回転体検出装置

【課題】非接触で精度の高い移動回転体の検出が可能となり、安定性にも優れた移動回転体検出装置を提供することである。
【解決手段】実施形態に係る移動回転体検出装置は、側部に回転体を有する移動体が移動する移動路の側部に設けられ、前記回転体の前記移動路の表面と垂直な方向の回転に対する速度情報を取得する速度情報取得手段と、この速度情報取得手段により取得された速度情報に基づき、回転体と認識できる速度パターンの検出処理を行なうことにより前記回転体を検出する回転体検出手段とを具備している。
(もっと読む)
撮像装置及びプログラム
【課題】CMOS型イメージセンサ等を用いて、ローリングシャッター方式で撮像されたボール像が歪んでいても、ボールの運動を正確に解析することができるようにする。
【解決手段】撮像装置100は、ボール像が楕円形に歪んだ状態で含まれるフレームを、内領域A3とその内領域A3と内領域A3の外側の外領域A4とを有する楕円分離度フィルターによってフィルタリング処理することによって、分離度を算出する分離度算出手段7gと、内領域A3の中心位置、長径、短径及び傾斜角を変更しながら分離度算出手段7gによって算出される分離度が最大となる中心位置、長径、短径及び傾斜角をボール像の中心位置、長径、短径及び傾斜角として推定する推定手段7hと、推定手段7hによって推定されたボール像の中心位置の差分とフレーム間のフレーム数とフレームレートとから、ボールの速度を算出する速度算出手段7pと、を備える。
(もっと読む)
車両状態検出装置
【課題】車両に設置されたカメラ20で撮像された画像データに基づいて、自車両の状態を検出する車両状態検出装置であって、その検出精度を向上させることを目的とする。
【解決手段】制御装置10(CPU11)は、カメラ20で撮像された複数の画像データを取得して、この複数の画像データの夫々において特徴点を抽出し、時間的に連続する画像データにおいて、特徴点の位置を追跡処理することによって複数のオプティカルフローを導出する(S10〜S30)。そして、導出された複数のオプティカルフローにおいて、方向と大きさの両方が同じであるオプティカルフロー同士を一つのグループに分類するとともに、オプティカルフローが最も多く含まれるグループのオプティカルフローを、自車両に対応する自車オプティカルフローとして選択し、選択された自車オプティカルフローに基づいて自車両の状態を検出する(S50〜S70)。
(もっと読む)
転がり軸受の転動体挙動測定方法および装置
【課題】 測定のための処置で転がり軸受の挙動に影響を及ぼすことなく、転動体挙動を測定することができ、また組立て後の完成された転がり軸受でもそのまま転動体挙動を測定することができる転がり軸受の転動体挙動測定方法を提供する。
【解決手段】 ころ7の軸受軸方向から見た中央部が、常に保持器8に隠れずに軸受外部から観察できる転がり軸受1の挙動を測定する方法である。転がり軸受1の内輪5を嵌合させた回転軸9の端面、および転がり軸受1のころ7の端面にマークM1〜M4を施し、回転軸9を回転させた状態で、ビデオカメラにより各マークM1〜M4を撮影する。この撮影した画像から得られるマークM1〜M4の軌跡より、回転軸9およびころ7の回転速度を算出する。また、求められた回転軸9の実際の回転速度を基準としてころ7の滑り率を算出する。
(もっと読む)
移動体の速度計測装置
【課題】移動体の移動速度を検出できる範囲を大きく確保でき、かつ、打撃前後の移動体の移動速度、移動体を打撃する物体の速度を同時に計測する。
【解決手段】ドップラーセンサ14を用いて打撃領域の前方から打撃領域に向かって移動するボール2と、打撃領域でボール2を打撃するバット4と、打撃されたあとのボール2とに向けて送信波W1を送信し、バット4とボール2とで反射された反射波W2を受信してドップラー信号Sdを検出する。ドップラー信号Sdから変換された中間データは蓄積部30に時間経過に従って順番に予め定められた蓄積期間分蓄積される。計測部18は、蓄積部30に蓄積された中間データに基づいて打撃時点を特定し、ボール2がアンテナ12に接近する方向に移動する接近速度、ボール2がアンテナ12から離間する方向に移動する離間速度、バット4の速度である物体速度を算出する。
(もっと読む)
球技用シミュレータ装置および球技用シミュレーション方法
【課題】ボールの移動方向および移動速度を検出できる範囲を大きく確保できシミュレーションを的確に行うことができる球技用シミュレータ装置および方法を提供する。
【解決手段】第1乃至第4のアンテナ12A〜12Dは、指向性を有し、供給される送信信号に基づいてボール2に向けて送信波W1を送信すると共に、ボール2反射された反射波W2を受信して受信信号を生成し、互いに離間して配置されている。第1乃至第4のドップラーセンサ14A〜14Dは、ドップラー周波数Fdを有する第1乃至第4ドップラー信号SdA〜SdDを時系列データとして生成する。計測シミュレーション部20は、予め得られている各アンテナ12A〜12Dを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出しボール2の飛距離、弾道を含む評価データを生成する。
(もっと読む)
速度計測装置
【課題】ノイズの影響を受けない速度を計測する速度計測装置を提供する。
【解決手段】速度計測装置10は、直交する3軸方向の加速度成分を計測する加速度計11と、入力した加速度成分を合成して得られた加速度から重力加速度を減算した第1加速度を求める加速度算出部12と、第1加速度を補正して第2加速度を求める加速度補正部13と、第2加速度に基づいて第1速度を求める速度算出部14と、第1速度から、ドップラ周波数を用いて速度を計測する電波速度計により計測された第2速度を減算した速度差を求める速度減算部15と、この速度差を入力して加速度補正値及び速度補正値を求めるカルマンフィルタ16とを備え、加速度補正部13は、第1加速度に対して加速度補正値を補正した値を第2加速度として求め、速度算出部14は、第2加速度を時間積分して求めた速度に対して速度補正値を補正した値を第1速度として求める。
(もっと読む)
しわ発生判別方法、プログラム、速度計測装置、形状計測装置、しわ発生判別装置及び画像形成装置
【課題】幅広いシート材種に対してシート材のしわ発生の余裕度を評価し、しわの発生を予防する技術を提供する。
【解決手段】波打ち形状算出手段が、ニップ部におけるシート材の搬送方向と直行する方向の搬送速度分布を記憶手段から読み出して(S1)、搬送速度分布からシート材の波打ち形状を算出し(S2)、しわ発生判別手段が、波打ち形状算出手段により算出された波打ち形状に基づいてシート材にしわが発生するか否かを判断する(S3、S6、S7)。
(もっと読む)
水中ロボット
【課題】
液体が流れる管路内を移動し、管路の異常を検知するための水中ロボットにおいて、水中ロボットの対地速度の正確な計測が可能な水中ロボットを提供する。
【解決手段】
水中ロボット1が、発光素子3、受光素子4及び演算装置で構成した光ドップラセンサ2を有しており、発光素子3が一定間隔で点滅してパルス波を出力し、受光素子4が管路30の内壁を反射したパルス波を受光し、発光素子3で発光したパルス波の点滅間隔と、受光素子4で受光したパルス波の点滅間隔から、演算装置が水中ロボット1の管路30の内壁に対する移動速度を算出するように構成した。
(もっと読む)
1 - 10 / 179
[ Back to top ]