
国際特許分類[G01P3/42]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 直線速度または角速度の測定;直線速度の差または角速度の差の測定 (1,568) | 電気的または磁気的手段の使用によって特徴づけられた装置 (1,301)
国際特許分類[G01P3/42]の下位に属する分類
国際特許分類[G01P3/42]に分類される特許
1 - 10 / 106
車載信号処理装置および信号処理方法
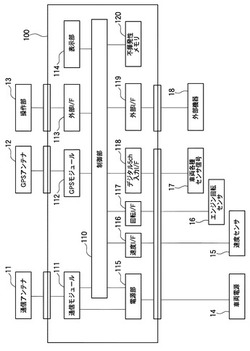
【課題】車速センサが出力する車速パルスから車速や走行距離を計算する際に用いる係数を、車両上における電波の受信状態が悪い状況であっても直ちに決定可能にする。
【解決手段】車速パルス信号に基づき車速又は走行距離を算出する情報処理部110と、パルス信号の特性を表す速度パルス係数の情報を保持する不揮発性記憶部120と、車両に搭載されるオドメータが表示しているオドメータ数値の入力を受け付けるオドメータ数値入力部113と、互いに異なる2つの地点のそれぞれにおいて入力された2つのオドメータ数値の差分を表す第1の走行距離を算出し、前記2つの地点間の移動に関し入力された前記車速パルス信号と前記速度パルス係数とに基づいて第2の走行距離を算出し、前記第1の走行距離と第2の走行距離とに基づいて前記速度パルス係数を修正する速度パルス係数修正部110とを備える。
(もっと読む)
車上装置

【課題】車庫から出庫する車両について、人手に頼ることなく、かつ、車輪径の変動分の累積を回避しながら車輪径を測定し得る車上装置を提供すること。
【解決手段】車庫1から出庫してゆく車両3について、特定された距離Lを走行したとき、車輪35の回転に応じたパルスを発生するパルス発生器34から供給されるパルス数を計測し、計測されたパルス数に基づいて、車輪35の径を算出する。
(もっと読む)
信号変換装置の検査システム
【課題】信号変換装置を効率的に検査することのできる信号変換装置の検査システムを提供することを目的とする。
【解決手段】信号発生器2は、検査用入力信号を被検査体である信号変換装置10に出力する。ここで、検査用入力信号は、例えば、周波数が連続的な値を取り、かつ、周波数が被検査体である信号変換装置10に要求される周波数範囲の上限値と下限値との間で変化する信号とされている。信号変換装置10では、検査用入力信号に対する出力信号が生成され、この出力信号が処理装置3に出力される。処理装置3は、被検査体である信号変換装置10からの出力信号に基づいて信号変換装置10の異常判定を行う。
(もっと読む)
車両及び車両の故障検知方法
【課題】本発明は、原動機として電動機を有する車両においても、駆動輪や出力軸の回転を検出する回転センサの故障検知を頻繁に実施可能とすることによって、回転センサから得られる情報の信頼性を向上可能な車両及び車両の故障検知方法を提供する。
【解決手段】本発明において、車両1は、モータ7と、モータ7からの機械的動力を、モータ7と係合する第1主軸11で受け、複数の変速段のうちいずれかを係合状態にして第1主軸11と駆動輪DW,DWとを係合させることが可能な第1変速機構と、モータ7の回転を検出するレゾルバ112と、カウンタ軸14の回転を検出する出力軸回転センサ114と、を備える。駆動輪DW,DW側から伝達されるトルクによってモータ7が制動力を発生させているとき、出力軸回転センサ114により検出されたカウンタ軸14の回転がゼロ又は負である場合には、カウンタ軸14を故障と判定する。
(もっと読む)
車両用制御装置
【課題】正確な車両の横滑り速度を得ることが可能な車両用制御装置を提供する。
【解決手段】推定走行経路Bにおける走行開始位置から所定時間経過後の推定車両走行位置1´と、推定走行経路Bにおける走行開始位置から所定時間経過後に対応する実際の車両走行位置1´´と、に基づいて車両1の幅方向への移動速度である横滑り速度を算出するようにしている。これにより、正確な車両の横滑り速度を得ることができる。
(もっと読む)
回転数計測装置
【課題】対象物の回転数を検知し、検出した回転数に基づき、正常回転数の上限及び下限を設定し、対象物の回転数がこれらの回転数からずれた場合は、これを検知して警報出力を発生する回転数計測装置を提供する。
【解決手段】測定対象物の回転数を検知する近接スイッチ14と、近接スイッチ14からのパルス信号を受ける制御部11と、制御部11に接続される表示器34とを有し、制御部11に設けられた回転数演算手段によってパルス信号から測定対象物の回転数を求めて、表示器34に対象物の回転数を表示する回転数計測装置10において、制御部11に、ボタン操作によって、測定した回転数を基準回転数とする基準回転数設定手段と、基準回転数から上限回転数と下限回転数を設定する上下限設定手段と、測定対象物の回転が上下限回転数の範囲を超えた場合、警報出力を発する警報信号発生手段が設けられている。
(もっと読む)
角速度検出装置及び角速度のエラー検出方法
【課題】 ノイズに伴う角速度変化に対しては、エラー検出せずに、故障による角速度の異常変化をノイズと区別してエラー検出することが可能な角速度検出装置及び角速度のエラー検出方法を提供することを目的としている。
【解決手段】 本実施形態の角速度検出装置は、プラスカウンターでは、「時間」ごとに算出した平均角速度「ASMAV(deg/s)」が、例えば、3000(deg/s)以上であるときに、3を加算するとともに3000よりも小さいときに、1を減算して第1のカウンター値Pを求める。マイナスカウンターでは、前記平均角速度「ASMAV(deg/s)」が、例えば、−3000(deg/s)以下であるときに、3を加算するとともに−3000よりも大きいとき、1を減算して第2のカウンター値Mを求める。各カウンター値が所定のエラー閾値(例えば20)を越えたときにエラーと判断される。
(もっと読む)
回転検出装置および回転検出方法
【課題】電磁ピックアップから出力される電圧信号に基づいて信号線の異常の予兆をとらえ、信号線の異常が実際に生じる前に修理等が可能な回転検出装置および回転検出方法を提供する。
【解決手段】回転歯車と、回転歯車の周面に近接して配置され回転歯車の歯の通過に伴い電圧信号を出力する電磁ピックアップと、電磁ピックアップからの電圧信号を受けて回転歯車の回転状態を検出する回転検出手段と、を備えた回転検出装置等において、回転歯車の回転数の安定状態を検出する安定状態検出手段と、回転数の安定状態において検出される電圧信号の振幅の変動幅Vcが基準値Vc0以上であるか否かを判別することにより電圧信号を伝送するための信号線の異常を予知する異常検出手段と、を備える。
(もっと読む)
エンコーダ
【課題】モータの回転情報を検出するエンコーダにおいて、低速回転時でも精度よく速度検出を行うことができるエンコーダを提供する。
【解決手段】位置検出器で検出した位置検出データが変化した場合に位置検出データを記憶するデータ記憶器と、データ記憶器で記憶した位置検出データと、位置検出器で検出した最新の位置検出データを比較し、位置検出データが変化した場合に位置検出データの変化量と変化するまでの時間をカウンタで計数し、位置検出データの変化量とカウンタで計数したカウンタ計数値を上位装置へ伝達する。
(もっと読む)
制御用回転速度算出装置、制御用回転速度算出方法及び制御用回転速度算出プログラム
【課題】安定制御を実現できる低コストの制御用回転速度算出装置等を提供する。
【解決手段】2つの汎用センサの回転信号を演算装置のCPU で処理する。一方のセンサによる回転速度が基準値Vs 未満で他方のセンサによる回転速度が基準値以上である場合(S11,YES又はS13,YES)には、大きい方の回転速度を選択し(S12,S14) 、その移動平均を制御用回転速度NEa とする。それ以外の場合には、2つのセンサについて現在と一つ前の回転速度の差分の絶対値を互いに比較し、差分の絶対値が小さい方のセンサによる現在の回転速度を選択し(S15,YESとS15,NO) 、その移動平均を制御用回転速度NEa とする。一方のセンサに不具合が生じてもショックレスの状態でスムーズに切り換えができ、エンジンの回転は不安定化しない。
(もっと読む)
1 - 10 / 106
[ Back to top ]