
国際特許分類[G01P7/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 直線速度または角速度,加速度,減速度,または衝撃の測定;運動の有無,または方向の指示 (7,765) | 加速度積算による速度測定 (24)
国際特許分類[G01P7/00]に分類される特許
1 - 10 / 24
速度算出方法、速度算出装置およびコンピュータプログラム
【課題】簡易な構成により実用的な精度で歩行または走行速度を算出することが可能な方法および装置を提供する。
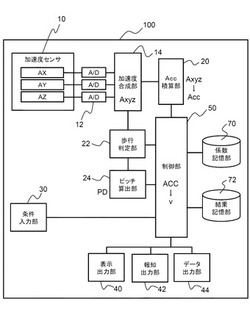
【解決手段】速度算出装置100は、加速度センサ10、Acc積算部20および制御部50を備えている。加速度センサ10は、歩行または走行する対象者の加速度を計測する。Acc積算部20は、加速度センサ10が計測した加速度を、歩行または走行周期よりも長い単位時間UTに亘って積算して合成積算値Accを求める。制御部50は、予め求められた近似式に合成積算値Accを適用して対象者の速度vを算出する。低負荷の演算により、実用的な精度で対象者の速度vが算出される。
(もっと読む)
慣性センサ素子

【課題】脚部を励振しない状態で角加速度を検出する。
【解決手段】慣性センサ素子1aは、板状の基部2と、第1、第2の検出脚部3,4と、枠状の支持部5と、検出電極とを備えている。第1の角加速度検出手段は、X軸廻りの角加速度による力に応じて発生した第1、第2の検出脚部3,4の歪みによる電圧信号を検出電極から受けて、電圧信号を基にX軸廻りの角加速度を検出し、第2の角加速度検出手段は、Y軸廻りの角加速度による力に応じて発生した第1、第2の検出脚部3,4の歪みによる電圧信号を検出電極から受けて、電圧信号を基にY軸廻りの角加速度を検出し、第3の角加速度検出手段は、Z軸廻りの角加速度による力に応じて発生した第1、第2の検出脚部3,4の歪みによる電圧信号を検出電極から受けて、電圧信号を基にZ軸廻りの角加速度を検出する。
(もっと読む)
物理量センサー
【課題】高い精度で物理量を検出し、製造誤差等があっても正確な物理量検出を可能にする調整機能を備えた物理量センサーを提供する。
【解決手段】第1系統の周波数信号12を発生する第1系統の周波数信号発生部10と、加速度の変化に応じた第2系統の周波数信号22を発生する第2系統の周波数信号発生部20と、第2系統のPLL出力信号27を出力する分数分周方式の第2系統のPLL回路90と、第1系統の周波数信号に基づく基準値生成信号のクロック数をカウントする第1系統のカウント部30と、第2系統のPLL出力信号のクロック数をカウントする第2系統のカウント部40と、デジタル演算部50と、検出信号生成部60と、加速度が加わっていない状態における基準値生成信号と第2系統のPLL出力信号の周波数が一致するように第2系統のPLL回路を制御する制御部80とを含む物理量センサー。
(もっと読む)
運動検出装置、電子機器、運動検出方法及びプログラム
【課題】いずれの軸方向に運動したか及び運動の大きさを簡易な処理で正確に検出する。
【解決手段】3軸加速度センサ12により検出された、運動検出装置10に作用する加速度の3軸の加速度成分データの各々を、ローパスフィルタ処理して得られた静止成分と、加速度成分データの各々から静止成分の各々を除いた動き成分とに分離する。分離された最大の値を示す動き成分に基づいて、いずれの軸方向に運動したかを検出する。また、その動き成分が、所定範囲の上限値を示す閾値Thuを超えた時点から下限値を示す閾値Thd未満となった後に所定範囲内の値となるまでの時間、または閾値Thd未満となった時点から閾値Thuを超えた後に所定範囲内の値となるまでの時間をシェイク時間として検出し、シェイク時間が判定時間以上か否かにより、またはシェイク時間内のベクトル積分値が判定閾値以上か否かにより振りの大きさを判定する。
(もっと読む)
加速度計測定サンプルから速度及び/又は変位を推定する方法
ユーザによる転倒を検出するのに用いられる転倒検出器が提供され、この転倒検出器は、上記転倒検出器に作用する加速度を表す測定サンプルの時系列を生み出す加速度計と、上記測定サンプルから上記転倒検出器の垂直速度及び/又は垂直変位を推定し、上記推定された垂直速度及び/又は垂直変位を用いて上記ユーザが転倒で苦しんでいるかを決定するプロセッサとを有し、上記プロセッサが、上記測定サンプルの時系列から上記加速度計の参照フレームにおいて重力が原因による加速度を表す単位ベクトルの対応する時系列を推定し、上記対応する単位ベクトル上へ各測定サンプルを投影し、上記転倒検出器の垂直加速度に関する推定の系列を与えるため、重力が原因による加速度を減算し、及び上記転倒検出器の上記垂直速度及び/又は垂直変位に関する値の時系列を与えるため、時間期間にわたり上記垂直加速度に関する上記推定の系列を積分することにより、上記測定サンプルから上記転倒検出器の垂直速度及び/又は垂直変位を推定するよう構成される。 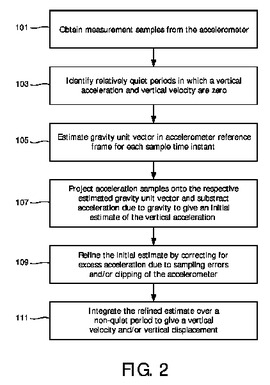 (もっと読む)
(もっと読む)
物理量センサー
【課題】比較的簡単な構成でありながら、より高い検出精度で所定の物理量を検出可能な物理量センサーを提供すること。
【解決手段】物理量センサー1は、第1、第2の共振器11、21の各共振周波数と対応づけられた周波数の第1、第2の周波数信号12、22をそれぞれ発生する第1、第2の周波数信号発生部10、20と、第1、第2の周波数信号の各周期数をそれぞれカウントする第1、第2のカウント部30、40と、第1、第2のカウント部の各カウント値32、42に基づいて、第1、第2の周波数信号の周期数の差を表すデジタル値52を計算するデジタル演算部50と、デジタル値52に基づいて、物理量に応じたデジタル値の検出信号62を生成する検出信号生成部60と、を含む。第2の共振器21の共振周波数は加速度の変化に応じて変化し、加速度が加わっていない状態における第1、第2の周波数信号の周波数が一致する。
(もっと読む)
センサ
【課題】複数のベクトル量を検出できるセンサを提供する。
【解決手段】ベース102と、ベース102に対して6自由度を有し、ベース102と対向して配置されたテーブル103と、テーブル103とベース102とを連結する並列配置された6つの連結部104とを備えてセンサ101を構成する。ここで、連結部104は、テーブル103の可動を受ける3自由度を有する軸受け106と、軸受け106の可動を受ける2自由度を有する軸受け107と、ベース102に固定され、軸受け107の可動を受けるアーム105と、を含んでいる。さらに、センサ101は、アーム105の変位および/または変形を検出する静電容量素子108と、静電容量素子108の検出値から、テーブル103もしくはベース102に作用する力の大きさおよび/または方向を計算する演算部を有する回路基板110と、を備えている。
(もっと読む)
歩行特性評価システムおよび軌跡生成方法
【課題】 歩行が困難な患者などにおける種々の3次元歩行特性を、どこでも無拘束で長時間測定して導出することができ、医師などの診断に必要な情報を十分に提示することのできる歩行特性評価システムを提供すること。
【解決手段】 歩行特性評価システム1は、一または複数の身体装着型センサ2、携帯型データ記録装置3および解析装置4からなる。身体装着型センサ2としては足の加速度および角速度を測定可能、かつ、少なくとも足爪先装着用のセンサを備え、携帯型データ記録装置3は身体装着型センサ2によって測定されたデータを記録し、解析装置4はそのデータを演算処理して一歩ごとの足爪先の3次元軌跡を生成可能なように形成された構成である。
(もっと読む)
速度検出装置および位置検出装置および位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】X軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを有するとともに、
スライダ1のX軸方向の位置に応じた信号を出力するレゾルバ30と、スライダ1のX軸方向の加速度を検出する加速度センサ31とを備えた位置検出装置300を備え、
位置検出装置300がレゾルバ30と加速度センサ31の出力に基づいてスライダ1の位置を求めることを特徴とする位置決め装置。
(もっと読む)
移動体の速度測定方法および同測定装置
【課題】移動体の速度を求める方法には、GPSによる方法、加速度計による方法があるが、それぞれ一長一短がある。また、両者を併用し、適宜切り換えて使用する方法も知られているが、瞬間瞬間の移動速度を高精度に測定することはできない。本発明は、移動体の瞬間瞬間の移動速度を高精度に求めることができる速度測定方法及び同装置を提供する。
【解決手段】位置を測定する位置測定装置と加速度を測定する加速度測定装置とを移動体に設置し、移動体の所定の移動時間における加速度測定装置の出力値の変化幅に応じて、位置測定装置の位置の差分を計算するための時間間隔であり、かつ加速度測定装置の出力値を積分後に移動平均する際の平均化時間である時間を決定し、上記位置測定装置より得られた平均移動速度と、上記加速度測定装置より得られた移動速度変動成分を合成して、移動体の速度を求める。
(もっと読む)
1 - 10 / 24
[ Back to top ]