
国際特許分類[G01S11/12]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 反射または再放射を用いない距離または速度の測定方式 (222) | 電波以外の電磁波を用いるもの (17)
国際特許分類[G01S11/12]に分類される特許
1 - 10 / 17
可視光通信装置、可視光通信方法及びプログラム
【課題】可視光通信の送受信装置間の距離を高精度に算出する可視光通信装置を実現することが求められる。
【解決手段】本実施形態によれば、可視光通信装置は、受信部と、遅延時間算出部と、距離算出部とを備えた構成である。受信部は、可視光に重畳された送信データを受信する。遅延時間算出部は、前記送信データの送信時間に対する前記受信手段での受信時間の遅延時間を示す遅延時間データを算出する。距離算出部は、前記遅延時間データに基づいて、前記送信データの送信位置と受信位置との距離を示す距離データを算出する。
(もっと読む)
距離変動計測装置

【課題】距離変動計測を行う前に光軸調整を行う機構を備えた距離変動計測装置を得る。
【解決手段】レーザ光による送信系−受信系間の距離変動計測装置であり、送信系が、基準となる変調信号を生成する変調信号発生器1d、変調信号に基づいてレーザ光を照射する光送信器1a−1c、光送信器のレーザ光のビーム方向を変更するビーム方向変更手段3,4、を含み、受信系が、送信系からのレーザ光を受光し受信信号を得る光受信器9a−9c、受信信号の位相検波を行い強度と位相を求める位相検波器9d、光受信器のレーザ光の受光視野を変更する受光視野変更手段11,12、位相検波器で求めた受信信号の強度が所定の閾値以上になるように受光視野変更手段11,12または通信機能により送信系のビーム方向変更手段3,4を制御して受光視野またはビーム方向の調整を行う光学的アライメント調整手段14,6を含む。
(もっと読む)
計測装置、計測システム、および計測方法
【課題】移動体の速度やドップラーシフトした受信角周波数を高精度かつ短時間で計測可能な計測装置、計測システム、および計測方法を提供することを目的とする。
【解決手段】受信器3は、送信器2から出力される単周波ビート信号の超音波を受信し、受信した信号を、少なくとも2つの異なる参照角周波数でそれぞれ直交検波し、受信角周波数を仮定した場合の各参照角周波数に基づく検波出力から各々算出される、受信振幅推定値または受信電力推定値の差分が目標精度(望ましくは「0」)となる場合の速度または角周波数を、送信器2の速度またはその受信角周波数として推定する。
(もっと読む)
単一のデバイスおよび/または複数のデバイスの測距探知、配向決定、および/または測位のための方法および装置
信号送信デバイスの測距探知のための方法および装置が提供される。この信号受信方法は、デジタルベースのみであり、アナログ測定デバイスである受信機を必要としない。測距は、最低で単一の信号送信機から隔置された距離範囲内で動作する単一のパルス放出デバイスと、単一のデジタル受信機と、処理回路とを使用して達成可能である。一般に、複数の送信パルスエミッタを、任意の固定三次元構成で配置された複数のデジタル受信機からなる構成を使用して、三次元(XYZ座標)で事実上同時に測距および測位することができる。適用例は、距離範囲を決定するように設計された受信機に対する少なくとも1個の信号送信機、または距離範囲を決定するために、オブジェクトから送信された少なくとも1つの反射信号を含み得る。 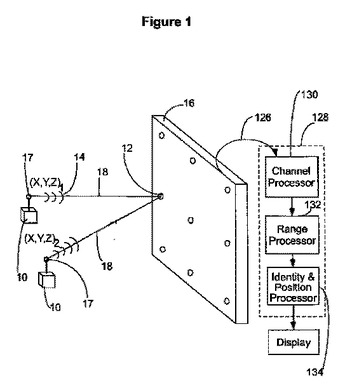 (もっと読む)
(もっと読む)
自律移動体
【課題】固有のID信号を含む赤外線を検出することにより自己位置を認識可能な自律移動体、およびこのような自律移動体を制御する自律移動体制御システム、およびこのような自律移動体を制御するために用いる位置認識方法において、複雑な設備を用いることなく、その認識する位置精度を向上させること。
【解決手段】移動体本体と、固有のID信号を含む赤外線を照射する赤外線照射部から照射された赤外線を検出する検出部とを備え、検出部で検出した赤外線に関する情報に基づいて自己位置を認識しつつ移動可能な自律移動体において、検出部で検出した赤外線に関する情報に、赤外線の入射方向を特定する情報を含ませることで、照射された赤外線を検出する際に、赤外線照射部に対する移動体本体の相対的な位置を精度よく求めることを可能とする。
(もっと読む)
情報転送装置、位置標定装置、情報転送プログラム、記録媒体および情報転送方法
【課題】通信機器の設置位置情報を利用して移動体の現在位置を高精度に算出できるシステムの普及拡大を図ること。
【解決手段】情報転送装置は、路側に設置された光ビーコン102から光ビーコン102に接近してくる車両101に発信される光ビーコン102の設置位置に関する情報を受信し、車両101が光ビーコン102の直下近傍に位置することを検出する。そして、受信された設置位置に関する情報を、車両101の位置標定先に送信する。ここで、車両101が光ビーコン102の直下近傍に位置することが検出されるまで設置位置に関する情報の送信を禁止し、検出された場合に設置位置に関する情報を送信する。
(もっと読む)
構造内の対象物の位置を決定する方法
本発明は、構造内の対象物の位置を決定する方法に関する。対象物は、構造内に配される複数の光源から変調光波を受け取る。変調は個別に符号化され、構造内の光源の位置は既知である。変調信号は同期され、これにより各受け取った変調光波の位相と比較位相との間の位相差の測定に基づいて対象物の位置を決定することが可能である。前記位相差は、距離計算のために用いられ、次に対象物の位置を与える。  (もっと読む)
(もっと読む)
受光装置、距離算出装置、距離算出プログラム、記録媒体および距離算出方法
【課題】既設のインフラ設備の有効活用を図りつつ、通信機器と移動体との相対距離の検出精度の向上を図ること。
【解決手段】移動体に設けられ、路側に設置された通信機器からの光信号を受光する受光装置408において、光信号を受光する受光面501aを有し、光信号を電気信号に変換する受光部501と、移動体の移動により、受光面501aに対する光信号の入射角度が所定の入射角度以上になった場合に当該光信号を遮蔽する遮蔽部502と、を備え、受光面501aのうち遮蔽部502によって遮蔽されなかった領域からの電気信号を出力するようにした。受光装置408が出力した電気信号を用いることにより、通信機器と移動体との相対距離の算出精度の向上を図ることができる。
(もっと読む)
操作システム、空中ポインティングデバイス及び操作方法
【課題】
非常に簡単な構成で表示画面上でのポインタの奥行き方向の操作を行うことができる操作システム、空中ポインティングデバイス及び操作方法を提供する。
【解決手段】
この操作システムは、表示画面上でポインタを操作するための操作システムであって、ミリ波帯域の電波を送信する第1の送信部と、第1の送信部との間で間隔の変位が可能で、第1の送信部から送信された電波を受信する第1の受信部と、第1の受信部により受信された電波の振幅を計測する計測部と、計測部により計測された電波の振幅の変化に応じて、表示画面でのポインタの奥行き方向への操作を実行するための操作信号を出力する出力部とを具備する。
(もっと読む)
通信ソースの位置を決定する方法および装置とこのような装置を使用する移動体通信システム
本発明は移動体通信ソースを位置決定するための方法および移動体通信ソースを位置決定するための装置に関する。本発明は少なくとも1つのこのような装置を使用する移動体通信システムに適切である。装置はオン/オフモードで動作する複数の赤外線波検出器1-4を含んでいるタイプであり、各検出器は予め定められた幾何学形状のセクタ中の可能な通信ソースから発生する赤外線放射による横断が可能な赤外線波吸収媒体へ挿入される。装置は前記複数の検出器が予め定められた通信ソースにより発生された予め定められたパワーを有するパルスの繰返しによって照射されるとき少なくとも1つの検出器により受信される最低のパワーを決定するため11Cで検出器からフォーマットされた信号を与えられる入力を有する手段10を含んでいる。 (もっと読む)
1 - 10 / 17
[ Back to top ]