
国際特許分類[G01S11/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 反射または再放射を用いない距離または速度の測定方式 (222) | 電磁波と音波の伝播時間差を用いるもの (54)
国際特許分類[G01S11/16]に分類される特許
1 - 10 / 54
キーレスシステム
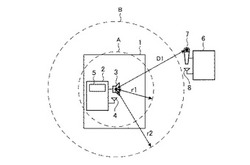
【課題】多数の車内アンテナや車外アンテナを必要とせず、より低コストにより近傍領域判定および車内外領域判定を実施することが可能なキーレスシステムを提供する。
【解決手段】車載機は電波を放射する第1のアンテナと、音波を放射するスピーカと、車とユーザの距離を算出する制御部とを備え、携帯機は第1のアンテナにより放射された電波を受信する第2のアンテナと、スピーカにより放射された音波を受信するマイクとを備え、車載機の制御部は第2のアンテナが第1のアンテナにより放射された電波を受信した電波受信時間およびマイクがスピーカにより放射された音波を受信した音波受信時間とに基づき車とユーザの距離を算出し、算出した車とユーザの距離に基づき携帯機が車内領域、車外近傍領域または車から離れた領域のいずれにあるかを判定するように構成したので、必要な部品数を減らすことが可能となる。
(もっと読む)
ナビゲーション端末及びその位置の取得方法

【課題】設備コストを抑え且つ所定精度を確保して端末の位置を取得できるようにする。
【解決手段】ランドマーク距離決定部3はランドマークLMkからの測位信号で端末1との間の距離を決定し、代表位置設定部4はマップ情報より、ランドマークを中心とし決定距離に等しい円上にあり、且つ端末1が移動可能な通路区画上にある位置から、端末1の候補位置としての代表位置を設定する。自律航法位置推定部6は自律航法によりランドマークから移動してきた端末1の位置を推定する。端末位置補正部7は、推定位置と代表位置とに基づく補正処理により、端末1の位置を取得する。
(もっと読む)
位置計測装置及びその方法
【課題】環境ノイズが大きなレベルの調査環境下であっても、遮蔽物内の被計測対象の特定位置を前記遮蔽物外から探査する装置を提供する。
【解決手段】遮蔽物内の被計測対象100の特定位置を遮蔽物外から計測する場合に、被計測対象100の特定位置に電磁波及び音響波を定期的に同時に発信する発信装置200を装着し、遮蔽物外に配置される探査装置300にて、発信装置200からの電磁波を受信すると共に互い異なる複数の位置で音響波を受信してそれぞれの受信結果から被計測対象100の特定位置を探査する。探査装置300は、電磁波が受信されてから複数の位置でそれぞれ音響波が受信されるまでの時間を計測し、時間計測結果から電磁波と音響波との速度差に基づいて複数の音響波受信位置における発信装置200との相対距離を求め、複数の音響波受信位置における発信装置200との相対距離に基づいて発信装置200の相対位置を特定する。
(もっと読む)
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法
【課題】対象の所在確認および追跡を行う自律型超音波屋内追跡システムを用いて対象の所在確認ならびに位置決定を行なう方法を提供する。
【解決手段】自律型超音波屋内追跡システム(AUITS)200は、RF信号および超音波信号を送信するためのRF送信器205および超音波送信器206を含む移動するタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し対象の所在を確認する位置決定機能(POD)202とを備える。PODは複数のリーフモジュールから構成され、各リーフモジュールには位置信号の超音波受信器があり、タグ装置から送信された超音波位置信号を受信する。リーフモジュール間には既知の構造トポロジー関係があり、各超音波受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、位置計算ユニット210で対象の位置が計算される。
(もっと読む)
位置測定システム、位置測定装置および位置測定プログラム
【課題】受信可能なTDOA測定が4つよりも少ない状態において、十分に良好な位置推定ができる位置測定システム、位置測定装置および位置測定プログラムを提供する。
【解決手段】3つ以上のランドマーク装置と、前記ランドマーク装置から送信される情報であって該ランドマーク装置の位置を示す位置情報を有する信号を受信する移動端末とを有する位置測定システムであって、前記移動端末は、該移動端末に内蔵されたセンサであって、該移動端末の移動運動を検出するセンサと、前記3つ以上のランドマーク装置のそれぞれから受信した前記位置情報と、前記センサの検出値とに基づいて、該移動端末の位置を算出する位置推定手段とを有する。
(もっと読む)
超音波測定用プローブの位置検出方法およびその位置検出装置
【課題】超音波測定用プローブ位置の誤検出を防止することができる超音波測定用プローブの位置検出方法およびその位置検出装置を提供すること。
【解決手段】超音波測定用プローブ1の位置に設けられ、超音波測定用プローブ1の位置から2種類の伝搬速度が異なる波動である赤外線および超音波を同時または所定間隔をおいて送波する赤外線送波器11および超音波送波器10と、予め既知の位置に所定の間隔Lを隔てて配置され、前記送波された各波動を受波する複数の受波器15a,15bと、各受波器15a,15bが検出した前記2種類の波動の到達時間差をもとに超音波測定用プローブの位置を検出する演算処理回路と、を備える。
(もっと読む)
位置検出装置、方法及びプログラム
【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
電子ペン装置
【課題】 長時間使用する場合であっても、描画性能が維持される電子ペン装置を提供する。
【解決手段】 本発明の電子ペン装置10は、電子ペン11が、電磁波送信手段と、超音波送信手段とを備える送信部を有し、受信部12が、電磁波受信手段と、少なくとも2つの超音波受信手段と、超音波が前記超音波送信手段から前記超音波受信手段に到達するまでの超音波伝搬時間を算出するデータ処理手段とを備え、データ処理装置14が、前記超音波送信手段と前記超音波受信手段との距離を計算して前記電子ペン11の位置を算出し、画像表示装置13上に電子ペン11の位置を表示し、前記超音波受信手段が、画像表示装置13の表示面側に配置され、移動手段15により、画像表示装置13に対して相対的に移動可能であり、前記移動が、画像表示装置13の表示面に対する垂直方向の移動を含むことを特徴とする。
(もっと読む)
爆発発生源推定装置及び方法並びにプログラム
【課題】爆発の発生源を精度よく推定すること。
【解決手段】爆発が発生し、観測地点から爆発によって生成される爆発雲を観測する場合に、爆発雲の状態に基づいて爆発の発生源に関する情報を推定する爆発発生源推定装置10であって、観測地点から爆発雲までの距離である観測距離と、観測地点から爆発雲を観測した方角とから爆発雲の地図上における位置である爆発位置を推定する爆発位置推定部1と、爆発雲の水平方向の最大幅、及び爆発雲の水平方向の最大幅の各端点と観測地点とをそれぞれ結ぶ直線によって挟まれた角度である雲幅角度のうち少なくともどちらか一方と、観測距離とに応じて推定される爆発規模を出力する爆発規模出力部2と、爆発雲の垂直方向の最大高さと、爆発位置の標高と、爆発規模とに基づいて、爆発を発生させた発生源の爆発高度を推定する爆発高度推定部3とを具備する。
(もっと読む)
面で囲まれる空間内部で作業を行う位置を特定する方法及び作業結果管理装置
【課題】ボイラ火炉等の面で囲まれる空間の内部の検査に用い、さらに複数の位置の検出が可能な容器の内部又は外壁の検査に用いられる位置特定方法及び作業結果管理装置を提供する。
【解決手段】面で囲まれる空間内部で作業を行う位置を特定する方法であって、前記空間内部の作業を行う位置が側壁であり、該側壁に略平行且つ位置座標が既知である同一直線上にない3点以上に音波信号を受信可能な受波器を設置し、前記空間の側壁の作業を行う位置に配置された音波を発信可能な送波器より信号を発信し、前記同一直線上にない3点以上の受波器それぞれに到達する前記信号の到達時間を計測し、前記到達時間と、前記3点以上の受波器の位置座標を用いて、前記送波器の位置座標を特定する
(もっと読む)
1 - 10 / 54
[ Back to top ]