
国際特許分類[G01S13/08]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263) | 路離のみを測定するための方式 (942)
国際特許分類[G01S13/08]の下位に属する分類
断続パルス変調波を送信するもの (390)
持続非変調波,振幅―,周波数―,または位相変調波を送信するもの (521)
国際特許分類[G01S13/08]に分類される特許
1 - 10 / 31
スクラップ表面プロファイル計測方法
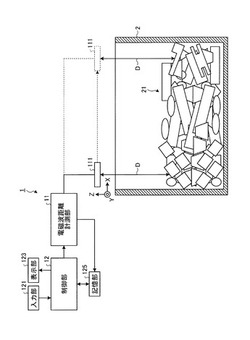
【課題】容器内に積層されたスクラップ表面までの距離を適正に計測して容器内のスクラップの表面プロファイルを高精度に計測することができるスクラップ表面プロファイル計測方法を提供すること。
【解決手段】電磁波距離計測部11は、容器2内のスクラップ21表面上に、容器2内のスクラップ21のうちの大きいスクラップ21のサイズと同程度またはそれ以下の大きさのスポットが照射されるように調整されたビーム幅の電磁波をアンテナ111から送信し、アンテナ111によってその反射波を受信することで容器2内のスクラップ21表面までの距離を計測する。
(もっと読む)
測距環境模擬装置

【課題】本発明は、飛しょう体や航空機等のプラットフォームに搭載され、かつFMCW方式が適用された測距装置の機能試験、あるいはその測距装置を含む系のシステム試験等に供される測距環境模擬装置に関し、測距装置の位置や姿勢の多様な形態に対して柔軟に追従し、測距装置の性能や機能の試験および評価を精度よく実現できることを目的とする。
【解決手段】FMCW方式の測距装置に到来する受信波に付帯するドップラ周波数を算出するドップラシフト算出手段と、前記測距装置によって送信された送信波に同期して、前記ドップラ周波数のドップラシフトとを模擬する周波数変換を前記送信波に施し、前記周波数変換の結果を前記受信波として前記測距装置に与える周波数シフト模擬手段とを備える。
(もっと読む)
デジタル制御されたUWBミリメートル波レーダー
超広帯域(UWB)ミリメートル(ミリ)波レーダーシステム(100)が、制御入力(106)、GHz信号出力、および周波数制御された出力(108)を有する信号源(105)を含む。制御ループ(146)が、GHz信号出力と制御入力との間に結合され、周波数分割器(110)と、デジタル制御されたPLL(115)とを含み、PLL(115)は、信号源の制御入力に結合されたロックされた出力を提供して、離散周波数掃引された、または離散周波数ホップされた、周波数ロックされた出力信号(119)を提供する。周波数乗算器(127)が、複数のミリ波周波数を出力するために、信号源の周波数制御された出力に結合される。アンテナ(134)が、ミリ波周波数を、応答信号を送られることになる表面(151)に送信し、そこから反射ミリ波信号を受信する。混合器(140)が、反射ミリ波信号とミリ波周波数とを混合し、処理回路(165)が、混合出力から、表面に関連した少なくとも1つのパラメータを判定する。 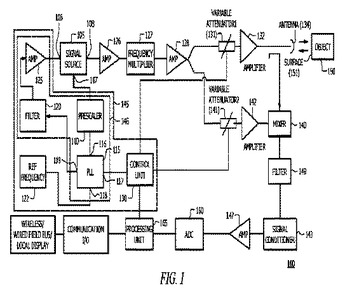 (もっと読む)
(もっと読む)
移動体検出方法及び移動体検出装置
【課題】データ処理を複雑化することなく、また、装置構成を大規模とすることなく、複数の移動体を区別して追跡することができる移動体検出方法及び移動体検出装置を提供する。
【解決手段】検出対象となる移動体までの距離を検出する測距センサ1を用いて複数の移動体までの距離をそれぞれ検出し、各移動体までの距離に基づいて各移動体の速度を算出して記憶し、二以上の移動体までの距離が互いに等しくなりその後にこれらの距離が異なるものとなったときには、記憶されていた各移動体の速度に基づいて、各移動体を区別する。
(もっと読む)
位相情報を用いた高分解能距離測定方法及び距離測定装置
【課題】FFT演算におけるデータ長に依存することなく、高い分解能で効率よく距離測定することができ、コストアップを避けることが可能となり、省電力化や装置の小型化も実現できる高分解能距離測定方法及び距離測定装置を提供せんとする。
【解決手段】周波数解析手段が、定在波又は混合波を周波数の変化分の関数としてフーリエ変換を行うことにより、距離変数を含まない位相項を有する距離スペクトルを算出し、距離スペクトルのピーク付近の位相(位相差)が一定であり、ターゲットの距離に比例した値とした。周波数解析は、複数の異なる中心周波数に基づいてそれぞれ距離スペクトルを算出し、その位相差に基づき、ターゲットまでの距離を求める。
(もっと読む)
飛翔体
【課題】比較的近距離の計測制度を確保しつつ装置構成を小型化する。
【解決手段】目標物までの距離を計測しつつ飛翔する飛翔体であって、目標物に対して第1の距離に接近するまではFM−CW方式に基づいて目標物との距離を計測し、第1の距離から第2の距離までの間はCW方式によって得られたビート信号に基づいて目標物との距離を計測する距離計測部を備える。
(もっと読む)
距離を測定するための距離測定装置および方法
【課題】誘電型センサの短所を克服し、連続的な距離測定、簡単な取り扱い、および多様な用途を可能にする、距離測定装置および方法を提供すること。
【解決手段】センサと評価エレクトロニクスとを有する距離測定装置において、センサが空胴共振器の形をした共振器を有していることを特徴とする距離測定装置および該空洞共振器を用いる方法。
(もっと読む)
測距システムおよび方法
【課題】対象までの距離を推定するシステムにおいて、サンプリング期間よりも小さいタイミングの違いを複雑なハードウェアを使用せず、また、高いサンプリングレートを必要としないで、対象までの距離を検知可能とする。
【解決手段】少なくとも1つのUWB信号を送信する送信機と、少なくとも1つのUWB信号を受信する受信機と、第1の周波数を有する複数のクロックおよび/またはサンプルパルスに依存して、受信されたUWB信号をサンプリングするサンプラと、第1の周波数より低い第2の周波数、およびUWB信号が実際に受信されるときと受信されたUWB信号がはじめてサンプリングされるときとの間の遅延に依存する位相を有する非整数信号を生成し、少なくとも、UWB信号の送信と受信との間のクロックまたはサンプルパルスの第1の数と、非整数信号の位相とに基づき、距離を決定するようにした。
(もっと読む)
レーダ・レベル測定
【課題】タンク中に含まれた製品の少なくとも1つのプロセス変数を決定する方法を提供すること。
【解決手段】この方法は、一組の距離対を得ることを含み、各対は、製品の表面までの距離の第1の距離測度と、製品表面の下のタンク中の固定の位置までの距離の第2の距離測度とを含み、各距離対は、マイクロ波をタンクの中に放射し、これを製品の方に向かって伝播させ、製品表面からのエコー及び固定位置からのエコーを含むタンクからの反射波を受信し、放射され受信されたマイクロ波に基づいて前記第1及び第2の距離測度を決定することによって得られる。距離対を使用して、製品表面までの距離と、固定位置までの実際距離と、固定位置までの距離の距離測度と、遅延係数との関係に基づいて、固定位置までの実際距離及び製品の遅延係数のうちの少なくとも1つが計算される。
(もっと読む)
移動ロボットの格子マップ作成方法及び装置及び媒体とこれを利用した領域分離方法及び装置及び媒体
【課題】 移動ロボットの格子マップ作成方法及び装置及び媒体とこれを利用した領域分離方法及び装置及び媒体を提供する。
【解決手段】 外部空間または障害物との距離を感知して格子点を獲得して格子マップを作成する格子マップ作成部と、格子点から特徴点を抽出する特徴点抽出部と、ロボットが移動した後にロボット自身の位置を推定して特徴点を再抽出することによって特徴点を更新する特徴点更新部と、特徴点抽出部により抽出された特徴点から特徴点更新部により更新された特徴点に変換する変換式計算部と、求められた変換式によって格子マップを更新する格子マップ更新部とを備える。
(もっと読む)
1 - 10 / 31
[ Back to top ]