
国際特許分類[G01S13/42]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の反射を使用する方式,例.一次レーダ方式;類似の方式 (1,818) | 物標の位置データを決定する方式 (1,263) | 距離とそれに類する他のものとの同時測定 (186)
国際特許分類[G01S13/42]の下位に属する分類
モノパルスレーダ,すなわち同時ロービング (119)
国際特許分類[G01S13/42]に分類される特許
1 - 10 / 67
レーダ装置
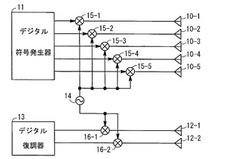
【課題】鉛直方向の方位測定精度が向上されたレーダ装置の実現。
【解決手段】レーダ装置は、送信アンテナ10−1〜10−5と、デジタル符号発生器11と、受信アンテナ12−1、12−2と、デジタル復調器13を有している。送信アンテナ10−1、10−3、10−5は、放射方向が斜め鉛直上方となるように設計され、送信アンテナ10−2、10−4は、放射方向が斜め鉛直下方となるように設計され、送信アンテナ10−1〜10−5全体では、放射方向が水平方向となるように設計されている。デジタル符号発生器11は、擬似雑音符号Aで変調された信号と擬似雑音符号Bで変調された信号とを合わせた信号が送信アンテナ10−1、10−3、10−5へと出力され、擬似雑音符号Bで変調された信号と擬似雑音符号Cで変調された信号とを合わせた信号が送信アンテナ10−2、10−4へと出力されるよう構成されている。
(もっと読む)
物体検出装置

【課題】移動体に搭載した場合に、受信信号のSN比の向上を実現しながらも、検出対象とする物体の相対速度の範囲を当該移動体の速度に応じて変更することを可能にする物体検出装置を提供する。
【解決手段】移動体に搭載され、複数のパルスからなる複数のパルス列で構成される送信信号を発生するパルス発生器1と、パルス発生器1の発生する送信信号について、所定の符号系列に従って送信信号のパルス列毎にデジタル変調を施した変調信号を出力する信号変換器2と、信号変換器2の出力する変調信号を送信波として送波するとともに、その送信波の反射波を受波するマイク6と、マイク6で受波した反射波から得られる受信信号と前記変調信号との符号の相関値を求め、その結果により反射波から得られる受信信号をパルス圧縮するパルス圧縮手段とを備え、移動体の速度に応じて、信号変換器2において用いる符号系列の長さを変更する。
(もっと読む)
測角装置、レーダ装置、測角方法及び測角プログラム
【課題】マルチパス環境下において、短時間でより精度の高い仰角推定を可能とする測角装置等を提供する。
【解決手段】測角装置としての測角処理器5は、第1仰角算出部51、第2仰角算出部52及び直接波仰角出力部50を備えたことを特徴とする。第1仰角算出部51は、受信信号に基づいて直接波仰角及び間接波仰角を算出する。第2仰角算出部52は、受信信号に基づいて直接波仰角のみを算出する。直接波仰角出力部50は、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力する。
(もっと読む)
レーダ装置
【課題】反射波の受信信号から反射元の種類を判別可能な技術を提供すること。
【解決手段】レーダ装置の信号処理部は、反射波のパワー(受信電力)Pと、このパワーPに対応する反射波の受信時点から観測周期Tsw=Tm遡った時点で受信された反射波のパワーPbと、に基づき、パワーPbに対するパワーPの変化量Y=log(P)−log(Pb)を算出する(S310)。一方、当該レーダ装置は、判別対象とする反射元の種類毎に、レーダ波が当該種類の反射元で反射して到来する反射波から算出される変化量Yの確率分布を記憶する。そして、算出された変化量Yと、上記反射元種類毎の確率分布とから、今回算出された変化量Yに対応するレーダ波の反射元の種類を判別する。即ち、反射元種類毎に、当該変化量Yが得られる確率Prを算出し(S320)、確率Prの最も高い種類を、今回のレーダ波の反射元であると判別する(S330)。
(もっと読む)
探知装置、レーダ装置、探知方法、および探知プログラム
【課題】他の物標に囲まれている物標であっても検知することができる探知装置を提供する。
【解決手段】物標探知部15は、近接する複数方位のエコー信号を比較することで、各物標の端部位置を判定する。具体的には、図6(A)に示すように、注目サンプルデータRCurrの値が0であり、同じ距離のスイープデータn−1のサンプルデータが0であり、1つ前の距離(自船に近い位置)におけるサンプルデータRpreも0であり、かつ1つ前の距離におけるサンプルデータRpreと同じ距離のスイープデータn−1のサンプルデータが1である場合、テーブルに記載されている各物標の端部位置を示す情報を検知結果として出力する。
(もっと読む)
レーダ装置
【課題】従来のESPRIT法における信号の処理時間は非常に長いという問題があった。
【解決手段】本発明のレーダ装置は、複数の受信アンテナを用いて受信した物標からの反射波に基づいて信号ベクトルを生成する信号ベクトル生成部と、信号ベクトルに基づいて部分行列を生成する部分行列生成部と、部分行列から正則行列を算出する正則行列演算部と、正則行列の固有値を算出する固有値演算部と、固有値から物標が存在する角度を算出する角度算出部と、を有することを特徴とする。
(もっと読む)
レーダ装置
【課題】対象物の水平方向と鉛直方向の両方の角度を検出できるレーダ装置を得る。
【解決手段】全てのアンテナは、水平面と直角となる平面である鉛直面に配置され、かつ長方形である開口面の長手方向が鉛直方向に配置され、受信アンテナRx1、Rx2は、素子間隔Lhで水平方向に配置され、送信アンテナTx1、Tx2は、受信アンテナRx1、Rx2を挟むように、水平方向に配置され、受信アンテナRx3、Rx4は、素子間隔Lvで鉛直方向に配置され、かつ、送信アンテナTx2に隣接して水平方向に配置され、送信アンテナTx1、Tx2から時分割に高周波パルス信号を送信させ、受信アンテナRx1、Rx2によって受信された2つの受信信号の位相差から水平方向の方位角を検出するとともに、受信アンテナRx3、Rx4によって受信された2つの受信信号の位相差から鉛直方向の仰俯角を検出する信号処理器10を備える。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】分解能メッシュと、地域メッシュの重なる面積に応じて地域メッシュの目標物の数量を求め、目標物の数量の管理を向上させる目標物管理装置および目標物管理方法を提供する
【解決手段】目標物が所在しているか否かを検出し、目標物が所在するときは分解能メッシュ各々における目標物の数量を求める検出部と、目標物が所在する第1のメッシュと重なる、監視対象範囲を予め設定した一定の領域で分割した範囲である第2のメッシュを抽出し、抽出された第2のメッシュと重なる目標物が所在する第1のメッシュの目標物の数量を分配し、抽出された第2のメッシュに関連付ける分配部と、地域メッシュ各々に分配された目標物の数量の総和を、地域メッシュ各々で求める算出部と、を備える目標物管理装置である。
(もっと読む)
レーダ装置
【課題】安定した相関追尾ができるレーダ装置を提供する。
【解決手段】FMCW方式のダウンスイープまたはアップスイープの信号を繰り返し送受信する送受信器20と、送受信器からの信号に基づく測角値を用いてビート周波数の空間を表すfbx−fby軸に座標変換するビート周波数軸変換部36と、ビート周波数軸変換部における変換によって得られたfbx−fby軸の空間において位置、速度および加速度を用いて相関追尾を行う相関追尾部37と、相関追尾部における相関追尾によって得られた結果をX−Y軸の位置および速度に変換するX−Y軸変換部38を備える。
(もっと読む)
レーダ装置
【課題】従来はレーダ装置が車両の進行方向のターゲットの高さを算出するために所定の演算処理時間がかかっていた。この演算処理時間による遅れ時間を解消し、より迅速な警報指令の送信を可能にする。
【解決手段】演算処理器26は、予め定めた検出範囲においてターゲット32の反射波42の強度の極小点を検知したときに警報器に対して警報指令を送る。検出範囲における強度の極小点の有無に基づいて警報指令の要否を判定することにより、従来よりも迅速に警報指令の要否判定を行うことが可能となる。
(もっと読む)
1 - 10 / 67
[ Back to top ]