
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
11 - 20 / 276
目標追随装置、誘導装置及び目標追随方法
【課題】カルマンフィルタを用いて正確に目標をトラッキングすることが可能な目標追随装置を提供する。
【解決手段】目標追随装置は、レーダ受信機、サンプル選択部及びトラッキングフィルタ部を具備する。レーダ受信機は、イルミネータからの送信波が目標で反射した反射波を受信し、受信した反射波に基づいて目標への角度及び反射波の受信電力を取得する。サンプル選択部は、受信電力の値が、過去の受信電力に基づいて設定される基準値から所定値以上減少しているか否かを判断し、基準値から所定値以上減少している場合、取得した角度及び受信電力を除去し、基準値から所定値以上減少していない場合、取得した角度及び受信電力を出力する。トラッキングフィルタ部は、サンプル選択部から出力される角度及び受信電力に基づき、目標の角度についてのトラックを推定する。
(もっと読む)
目標運動推測システム及び方法

【課題】各探信の度に目標の速度及び該速度の時間変化を取得できる目標運動推測システム及び方法を提供する。
【解決手段】未知のパラメータである目標の速度成分及びその時間変化成分から成る速度パラメータベクトルを生成し、該未知のパラメータ数と同数以上のセンサの観測データから得られる目標のドップラー速度を成分とするドップラーベクトルを生成し、さらに各センサの観測データから得られる目標の方位及び該目標からの波の発信時刻を用いて未知のパラメータ数と同数の成分を有する方位行列を生成する。そして、速度パラメータベクトルをドップラーベクトルと方位行列の乗算結果で示す連立方程式を構築し、この連立方程式を解くことで、未知のパラメータである目標の速度成分及びその時間変化成分を求める。
(もっと読む)
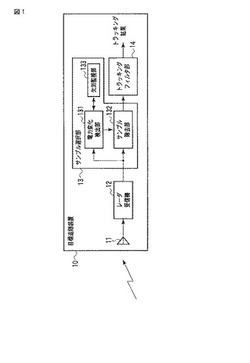
2チャネル追尾装置、および追尾方法
【課題】衛星位置検出の精度の低下を防止する、2チャネル追尾装置および追尾方法を提供する。
【解決手段】追尾装置1は追尾信号から和信号と差信号を生成し、和信号を信号発振器14が生成する変調信号で抑圧搬送波振幅変調を行い、変調和信号と差信号を合成する。和信号と合成信号を増幅し、中間周波数に変換し、伝送する。AGC回路20は和信号を増幅し、AGC回路21は和信号の利得との差分が所定の範囲内になるよう合成信号を増幅する。検波器24と検波器23は、和信号と90°移相した和信号でそれぞれ合成信号を位相検波し、追尾誤差信号の同位相成分と直交位相成分を検出する。同期検波器26と同期検波器25は、同位相成分と直交位相成分を変調信号で同期検波し、伝送された変調信号の同位相成分と直交位相成分を検出し、伝送中の位相変動αと振幅変動Aを算出する。αとAに基づき追尾誤差信号の直流成分を補正し、アンテナ駆動部などに送る。
(もっと読む)
目標物管理装置および目標物管理方法
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
信号検出装置、信号検出方法及び信号検出プログラム
【課題】S/Nの低い受信信号であっても、検出漏れや誤判定の発生を抑制することができ、確信度がある程度ある目標があった場合に、追尾が継続しやすくなる追尾処理部を備える信号検出装置の提供。
【解決手段】音波や電磁波を発信し、目標からの反響信号の受信信号を所定の区間切り出して反響信号のスペクトルに変換した上で特徴抽出を行いパターン認識用のパターンを生成する前処理部と、入力されたパターンをあらかじめ学習されたSVM(サポートベクターマシーン)により、目標らしさを判定し、その出力を正規化し確信度として出力するパターン認識部と、確信度を閾値判定し、検出ありと判定された場合は、目標の方位距離やS/Nなどの検出目標に関わる情報を算出する目標情報算出部と、追尾処理に位置情報以外のSVMなどのパターン認識処理自体の出力値である確信度値を活用した追尾処理部を備える。
(もっと読む)
追尾情報管理装置、追尾情報管理システム及びレーダ装置
【課題】異なるレーダ装置間で整合のとれた追尾情報を表示可能なレーダ装置を提供する。
【解決手段】追尾情報管理装置は、受信部と、判断部と、グローバルID付与部と、送信部と、を備える。受信部は、レーダエコーに基づいて目標追尾を行うことで得られたTT情報を複数のレーダ装置から受信する。判断部は、TT情報に含まれる目標エコー同士が物標を示すか否かを判断する。グローバルID付与部は、判断部の判断結果に基づいて、同一の物標を示す目標エコーに同一のIDを付与する。送信部は、グローバルID付与部が付与したグローバルIDをそれぞれのレーダ装置に送信する。各レーダ装置は、グローバルID付与部から付与されたグローバルIDとともに、目標エコーを表示する。
(もっと読む)
目標追尾装置
【課題】PRI内距離を目標の運動諸元の推定処理に利用できるようにして、目標の運動諸元の推定精度を高めることができる目標追尾装置を得ることを目的とする。
【解決手段】PRI内距離ゲート内外判定部14によりゲート内にあると判定されたPRI内距離毎に推定値の仮説を生成して、その仮説の信頼度を算出し、1以上の仮説の中で、信頼度が高い仮説を採択する推定値仮説生成部15や、推定値仮説生成部15により採択された仮説に係るPRI内距離を用いて、現時点での運動諸元の推定値を更新するPRI内距離フィルタ処理部16などを備える。
(もっと読む)
目標類識別装置
【課題】目標信号データのクラッタ推定精度に左右されずに、所望の類別性能を維持する目標類識別装置を提供する。
【解決手段】異クラッタ条件の教師信号データを用いてクラッタ推定精度別の辞書データを生成するクラッタ推定精度別辞書生成部2と、目標信号データのクラッタ推定精度に応じてクラッタ推定精度別の辞書データから照合対象となる辞書データを選択するクラッタ推定精度別辞書選択部5と、クラッタ推定精度別辞書選択部5により選択された照合対象辞書データに基づいて目標信号データの種類を判定する種類判定部6とを備えた。
(もっと読む)
追尾装置
【課題】フィルタを簡易に切り替えて早期に目標に追従可能とし、計算量の削減を図る。
【解決手段】等速直線運動モデル、蛇行運動モデル、多重運動モデルに基づくカルマンフィルタを用い、観測値から予測値、予測誤差共分散行列、観測誤差共分散行列および平滑値を算出する各カルマンフィルタ処理手段3〜5と、観測値、カルマンフィルタ処理手段3による各値に基づいて、目標が等速直線運動であるかを判定する等速直線運動判定手段7と、観測値、各カルマンフィルタ処理手段による各値に基づいて、各運動モデルに対する尤度を算出する尤度計算手段6と、各運動モデルに対する尤度および等速直線運動判定手段7による判定結果に基づいて、各運動モデルに対する信頼度を算出する信頼度計算手段8と、各運動モデルに対する信頼度に基づいて、各平滑値の加重平均値を算出する加重平均計算手段9とを備えた。
(もっと読む)
追尾装置及びコンピュータプログラム及び追尾方法
【課題】正しい相関決定を実施する。
【解決手段】探知データ取得部110は、時刻ごとにセンサから探知データ512を取得する。航跡データ記憶部120は、航跡データ(航跡群521)を格納する。ゲート計算部131は、航跡データから計算した航跡の予測位置に基づくゲートを計算する。ゲート内外判定部132は、探知データが前記ゲート内に入るかどうかを判定する。相関尤度計算部133は、航跡が初探知データのみから構成される場合は、探知データ取得部110によって取得された前記探知データ情報に基づいて第二探知データとの相関尤度を計算し、航跡が初探知データ以降の探知データからも構成される場合は、航跡の予測位置に基づいて、前記ゲート内に入る探知データとの相関尤度を計算する。
(もっと読む)
11 - 20 / 276
[ Back to top ]