
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
271 - 276 / 276
イメージ拡張型の慣性航行システム(IAINS)および方法
輸送手段(10)上に搭載されたイメージ拡張型の慣性航行システム(LAWS)は、航行状態ベクトルを推定するように構成された慣性航行システム(INS)と、イメージャーの視野(x,y,z)を通過する地形特徴に関連するピクセル信号を出力するように構成されたイメージャー(12)とを含む。システム(IAINS)は、慣性航行システム(INS)とイメージャー(12)とに動作可能に接続された処理装置をさらに含む。処理装置は、特徴ピクセル信号に関連する所与の画像フレームに対して、イメージャーからイメージャーの視野を通過する1つまたは複数の地形特徴の中心までの距離を感知するように構成される。処理装置はまた、地形特徴がイメージャーの視野を通過するにつれて、各地形特徴を追跡するようにも構成される。処理装置はさらに、追跡された地形特徴に関する慣性航行システム(INS)の計算されたNED(前、右、下)座標位置情報に基づき、慣性航行システム(INS)の航行状態ベクトルを更新するように構成される。 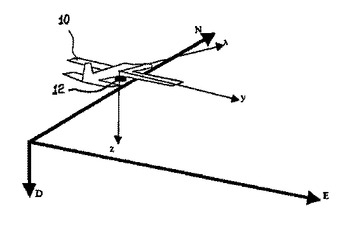 (もっと読む)
(もっと読む)
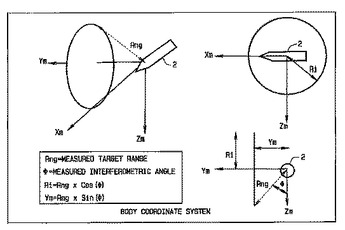
レーダ戻りデータを重み付ける方法および装置
前記レーダターゲット(48)の位置を決定することにおいて位相レーダエコーからの加算による地勢エコーフェーディングの影響を減少する方法が提供される。この方法は、レーダターゲットの地勢特徴から生じるレーダエコーフェーディングの程度に比例する、干渉角Φへ寄与する地勢特徴の影響を調整することにより、少なくともひとつのレーダエコーに基づきレーダターゲットへの干渉角Φを決定するステップと、干渉角Φをフィルタリングするステップとを含む。訂正された干渉角Φは、フィルタリングの少なくとも一部に基づいて提供される。
 (もっと読む)
(もっと読む)
レーダ装置

【課題】 自移動体の航路策定に対する影響の高い周辺移動体の識別を容易にする。
【解決手段】 レーダ装置10は、探知信号に基づいて周辺移動体の動作変化量を算出する動作変化量算出部24と、動作変化量の所定値に対する大小を判別する動作変化量判別部26と、を備える。出力部12は、探知結果に加えて、動作変化量判別部26による動作変化量の判別結果を出力する。
(もっと読む)
エコー照合装置

【課題】 基準エコーマップと観測エコーマップの基準原点がオフセット誤差を持つ場合でもエコー照合時の誤照合を少なくする。
【解決手段】 重心追尾手段1は、捜索レーダからの目標群の位置情報をもとに、目標群の重心推定位置と重心推定速度を求め、基準エコーマップ作成手段2は、目標群の位置情報をもとに基準エコーマップを作成する。エコーマップ補正手段3は、別レーダから得られた観測エコーマップと、重心推定速度と、基準エコーマップを入力し、観測エコーマップの位置補正を行い、相関手段4は基準エコーマップの基準エコーと観測エコーマップの観測エコーの対応付けを行う。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】 追尾目標の色彩が中間色の場合、その中間色を示す属性データZk,id(i)が目標観測装置1から出力されず、その中間色に近い他の色を示す属性データZk,id(i)に基づいて観測データZk,trk (i)を選択する必要があるため、観測データZk,trk (i)の信頼度が低下し、追尾目標を精度よく追尾することができない課題があった。
【解決手段】 運動諸元相関器24から出力された観測データZk,trk (i)に係る属性データZk,id(i)と、属性データ推定器25から出力された属性データの推定値Xハットk,id(i)の相関を判定し、相関関係がある観測データZk,trk (i)を選択する。
(もっと読む)
多目標追尾装置
【目的】 複数の目標及びクラッタ等の不要信号から、位置等の運動諸元の探知情報と類識別結果等の属性の探知情報が得られる環境下において、目標の位置及び速度を推定しながら精度良く追尾できる多目標追尾方法及びその装置を得る。
【構成】 追尾目標と相関の可能性のある探知情報を位置等の運動諸元に基づく処理及び属性に基づく処理の2段階により選択し、平滑及び予測計算においては選択された探知情報に対する時々刻々の信頼度の計算に運動諸元及び属性情報を利用することにより、目標位置、速度の最適な推定値を算出する。
(もっと読む)
271 - 276 / 276
[ Back to top ]