
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
31 - 40 / 276
目標追跡システム及び目標追跡方法
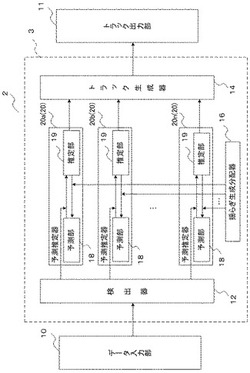
【課題】 多重仮説追尾にパーティクルフィルタを適用する場合でも、演算量を抑制しながら、高精度に目標が追跡できるようにする。
【解決手段】 目標からの信号波に基づき当該目標を検出して検出目標位置として出力する検出器12と、少なくとも外乱や測定誤差に起因する揺らぎを生成して出力する揺らぎ生成分配器16と、前記検出目標位置に基づき目標の真の位置を推定し、その際に前記揺らぎに基づき仮想粒子を設定して、当該仮想粒子を用いて前記真の目標位置を推定する予測推定器20と、を備えることを特徴とする目標追跡システム。
(もっと読む)
目標追跡装置

【課題】等速直線運動を行う目標と等速直線以外の運動を行う目標の両方に対して追跡性能を向上させることができる目標追跡装置を得る。
【解決手段】目標を追跡するアクティブセンサ3からの観測値に基づく目標航跡と、目標の角度を測定するパッシブセンサ1からの観測値に基づく目標航跡とが同一目標を示していると判定した場合にこれら2つの目標航跡のデータ融合を行ってデータ融合航跡として出力するデータ融合部5と、データ融合部からのデータ融合航跡に基づいて、パッシブセンサからの観測値を入力して目標の航跡を算出するための補正情報を算出する補正情報算
出部6aと、パッシブセンサからの観測値と補正情報算出部からの補正情報に基づいて、複数の運動モデルに対応する目標の航跡を算出し、複数の運動モデルに対応する目標の航跡を加重平均して目標航跡として出力するパッシブセンサ処理部2aを備える。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、全方位に亘って同一PRIを使用しているため、見通し外となる範囲を含む方位に対しても同一PRIを使用し、時間的リソースを有効に使用できていない。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
(もっと読む)
精測進入レーダ、精測進入レーダ制御方法およびその制御用プログラム
【課題】着陸誘導対象機の検出を安定して実施する。
【解決手段】ASR40から取得した追尾目標データDおよびSSR50から取得した追尾目標データEに基づいて進入機情報をレーダ表示手段30に表示し、オペレータによって誘導対象機が選択されると選択された航空機の進入機情報に基づいて目標物検出手段10で検出する対象機のドップラ周波数の予測値および予測位置を追尾管理制御部21が算出し、算出したドップラ周波数が中心周波数となるようなフィルタ係数をフィルタ係数制御部14が算出し、フィルタ係数制御部14が算出したフィルタ係数を目標物検出フィルタ11に設定する。追尾管理制御部21は、電波の送信方向が予測位置に向くように設定された電子走査式アンテナ1を介して電波を出力すると共に電波の反射を受信する。受信した反射波から目標物検出フィルタ11で航空機の反射信号である目標物信号を抽出する。
(もっと読む)
レーダ装置
【課題】本発明は、レーダ装置に係り、追尾対象の物標を正確に検出することにある。
【解決手段】電波を送信する送信手段と、送信手段から送信される電波の反射波を受信し得る受信手段と、受信手段に受信される信号のうちから反射波の信号レベルと反射波以外の信号レベルとを閾値により区別する受信信号レベル判定手段と、受信信号レベル判定手段により区別された反射波を示す信号に基づいて、物標の距離又は方位を検出する物標検出手段と、物標検出手段により検出される距離又は方位の時間的変化量が所定量以下である物標を追尾対象に、かつ、該時間的変化量が該所定量を超える物標を追尾対象外に、それぞれ設定する物標設定手段と、物標設定手段により設定される追尾対象の物標及び追尾対象外の物標に基づいて、受信信号レベル判定手段にて用いる閾値を変更する閾値変更手段と、を設ける。
(もっと読む)
追尾処理装置
【課題】目標に関する状況判断に資する情報が提供される追尾処理装置を提供する。
【解決手段】相関処理部は、監視区域に存在する目標の位置と、追尾中目標の登録予測位置と、登録判定結果に応じて異なる閾値とに基づいて、目標と追尾中目標とが同一かどうか判定する相関処理を実行する。予測処理部は、位置及び登録予測位置に基づいて目標の次回の予測位置を算出する。予測判定部は、位置、目標の種類に対応する斜面移動能力、及び監視区域の地勢情報に基づいて目標が次回に到達し得る目標存在範囲を算出し、予測位置及び目標存在範囲に基づいて目標が予測位置に到達可能かどうかの予測判定を実行し、予測判定の結果で登録判定結果を更新する。目標存在範囲提示部は、目標存在範囲を地図上の領域として提示する。予測変更部は、予測判定の結果が「到達可能」の場合に予測位置で登録予測位置を更新する。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
レーダ装置
【課題】 物標との距離以外の情報が得られない検出エリアを含む複数の検出エリアにて物標検出を行うレーダ装置において、距離以外の情報が得られない検出エリアでも、移動物標であるか否かを速やかに判断できるようにする。
【解決手段】側方検出エリアで追跡中の物標が存在せず(S110:NO)、側方探査モードでの測定結果に基づき物標(側方検出物標)が検出された場合(S120:YES)、同時に、後方探査モードでの測定結果に基づき重複エリアで移動物標(重複エリア移動物標)が検出されていれば(S130:YES,S140:NO)、側方検出物標を側方検出エリアにて追跡の必要がある追跡対象物標として登録すると共に、その登録した追跡対象物標に、重複エリア移動物標の情報を引き継ぐ(S150)。
(もっと読む)
レーダ装置及びレーダ装置の信号処理方法
【課題】簡単な装置構成で、ウェザークラッタの影響を受ける領域における目標の検出率を向上させ、安定した目標追尾が行えるレーダ装置及びその信号処理方法を提供する。
【解決手段】信号処理器2は、検出処理手段21、追尾処理手段22、及びウェザー判定処理手段23から構成されている。ウェザー判定処理手段23は、ウェザークラッタの影響を受ける領域(ウェザークラッタ情報)を算出し、ウェザークラッタ情報を取得した検出処理手段21は、ウェザークラッタの影響を受ける領域に対して、通常の検出判定用スレッショルドよりも低く設定されたウェザークラッタ領域検出判定用スレッショルドを適用するようにした。これにより、簡単な装置構成で、ウェザークラッタの影響を受ける領域における目標の検出率が向上し、安定した目標追尾を行うことが可能なレーダ装置が得られる。
(もっと読む)
多目標追尾装置、多目標追尾方法、および多目標追尾プログラム
【課題】追尾ビームを効率的に追尾目標に照射し追尾精度を有効に向上させる。
【解決手段】電子走査アンテナ部101で取得された信号に基づいて、一のビーム照射により検知可能な異なる追尾目標を追尾目標グループとして決定する追尾目標グループ算出部110と、追尾目標グループに含まれる異なる追尾目標間の相互位置関係に応じて追尾用のビームの照射スケジュールおよび照射領域を示すビームパラメータを算出する、追尾ビームパラメータ算出部106と、算出されたビームパラメータに基づき電子走査アンテナ部101によるビーム照射動作の起動スケジュールを決定し、これに基づき電子走査アンテナ部におけるビーム照射動作を制御するアンテナ制御部109を備えた。
(もっと読む)
31 - 40 / 276
[ Back to top ]