
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
61 - 70 / 276
拡張現実のためのブロードバンドパッシブ追跡
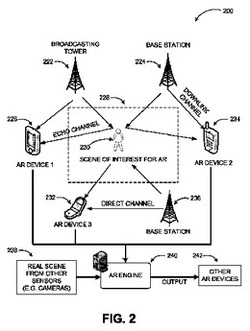
それぞれが周囲の放送ソースからの電磁波(たとえば、無線周波数「RF」信号)を感知する能力を有するいくつかのパッシブ受信機を使用することができるブロードバンドパッシブセンシングおよび追跡システムに関する技術が、全般的に説明される。各パッシブ受信機は、1つまたは複数のアンテナによって感知するように構成され得る。異なる位置の複数の受信機が、関心のあるシーンの協調した追跡を行うように構成されたブロードバンドセンシングネットワークを形成するために利用され得る。一部の例によれば、ビームフォーミングアルゴリズムが、物体を測位および追跡するためにパッシブ受信機によって形成されたアンテナアレーを利用するブロードバンドセンシングネットワークに適用され得る。 (もっと読む)
先行車検出装置

【課題】2WS基準システムまたは4WS基準システムにおけるオフセット値に対して、さらに自車に適合する差分量を加算することによって、カーブ路における自車線上の先行車を精度よく検出できる先行車検出装置を提供する。
【解決手段】本発明の先行車検出装置は、自車の車両情報に基づいて当該自車が2WS車か4WS車かを判定する車両判定手段と、自車の前方にある物標の横位置情報を取得する横位置情報取得手段と、2WS車または4WS車に応じて横位置情報を自車のカーブ路における車体スリップ角が0度である直線走行方向基準の横位置情報に換算するオフセット値を算出するオフセット値算出手段と、オフセット値に基づいて横位置情報を直線走行方向基準の横位置情報に換算する直線走行方向基準換算手段と、直線走行方向基準の横位置情報に基づいて自車の前方にある物標が自車の前方にある先行車であるか否かを判定する先行車判定手段とを備える。
(もっと読む)
先行車検知装置
【課題】継続して存在する先行車が一時的に先行車と認識できなくなった場合に、その車両を先行車として早期に再認識することが可能な先行車検知装置の提供。
【解決手段】ECU5は、物体検知センサ2が今回検出した検出物体が前回よりも以前に検出された既検出の物体と同一であると推定した場合、その既検出の先行車の先行車適合情報を今回検出した物体の先行車適合情報として設定する引継ぎ処理を実行し、引き継がれた先行車適合情報に基づいて先行車の認定を行う。
(もっと読む)
エコー信号処理装置、レーダ装置、エコー信号処理プログラム及びエコー信号処理方法
【課題】簡単な構成で、物標追尾等の処理で用いることができる有用な情報を取得することが可能な信号処理装置を提供する。
【解決手段】信号処理装置3は、スキャン相関処理部33と、物標状態判別部38と、を備える。スキャン相関処理部33は、第1の時刻に受信された第1エコー信号のレベルと、前記第1の時刻よりも前の第2の時刻に受信された第2エコー信号のレベルと、に基づいて、第1の時刻におけるスキャン相関信号レベルを出力する。物標状態判別部38は、第1エコー信号のレベルと、第1の時刻におけるスキャン相関信号レベルと、に基づいて、第1エコー信号に対応した物標の状態を判別する。
(もっと読む)
目標追尾装置
【課題】必要最小限のセンサ使用回数を効率的に決定することができる目標追尾装置を提供する。
【解決手段】目標追尾装置10は、追尾処理部2と、レーダ制御要否判定部3と、レーダ使用回数決定部4と、レーダ指示部5とを有している。追尾処理部2は、レーダ群1から得られた観測値を用いて目標の運動諸元を算出して、その算出した運動諸元から、目標航跡を導出するとともに、目標航跡の誤差共分散行列を算出する。レーダ制御要否判定部3は、目標航跡の誤差共分散行列に基づく目標航跡の推定精度と要求精度とを用いて、レーダ制御を実施するか否かを判定する。レーダ使用回数決定部4は、目標航跡の誤差共分散行列と、センサ毎の観測精度及び要求精度とを用いて、第1及び第2レーダ1a,1bのそれぞれについてのセンサ使用回数を制約付き最適化問題から導出する。
(もっと読む)
経路予測装置
【課題】観測データが長期間に亘って欠けている時においても信頼性ある経路予測が可能な経路予測装置を得る。
【解決手段】観測情報記憶部に記憶されている観測情報を監視し解析し、観測データが得られている間は該観測情報の解析結果を元に上記目標側経路評価関数パラメータ値調整部を周期的に実行し上記目標側経路評価関数パラメータ値記憶部に記憶されているパラメータの値を調整し、観測データが欠けている間は上記目標側経路評価関数パラメータ値記憶部に記憶されているパラメータの値を上記目標側最適経路生成部に入力して目標側最適経路を生成させる経路予測システムタスク実行部を含み、経路予測システムタスク実行部は、観測情報の解析結果に応じて、目標側経路評価関数パラメータ値調整部で調整するパラメータの数を変更する。
(もっと読む)
レーダ処理装置
【課題】信号処理に最大限の処理時間を費やせるレーダ処理装置を得る。
【解決手段】観測諸元を管理してレーダによる観測を制御する観測制御部1と、複数の追尾処理単位の情報を格納する追尾処理データベース4と、受信信号を信号処理する信号処理部2と、目標の追尾処理を行う追尾処理部3と、観測緒元に基き、追尾処理データベース4から対象とする追尾処理単位の情報を取り出して追尾処理単位の処理時間の上限値を算出し、算出した追尾処理単位の処理時間の上限値及び観測諸元を出力する追尾処理負荷予測部5と、予め設定されているレーダが電波を受信してから追尾結果を出力するまでの時間の上限値から、前記追尾処理単位の処理時間の上限値を引いて信号処理に費やせる処理時間を算出し、算出した信号処理の処理時間及び前記観測緒元に基づいて、信号処理の処理時間を規定するパラメータを変更して信号処理部2へ出力する信号処理内容変更部6とを設けた。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、目標とクラッタをドップラ周波数で分離し、狭帯域フィルタを通過した目標の電力で利得制御を行っていたため、電力が大きいクラッタを受信した時に、受信系が飽和するという問題があった。
【解決手段】 受信系の初段に阻止帯域の異なる複数のノッチフィルタを備え、外部に備えた速度センサ及び姿勢角センサからの情報をもとにクラッタ周波数を計算し、適合する阻止帯域のノッチフィルタを選択する。選択したノッチフィルタは、受信した目標信号のみ通過させ、クラッタを減衰させる。これにより、クラッタにより受信系が飽和する問題を解消する。なお、受信系の初段にフィルタを配置すると、NFが劣化し、低S/Nの目標の検出が困難になる問題があるため、高度が低くクラッタ電力が大きい時のみ、ノッチフィルタを通過させるよう、切換えを行う。
(もっと読む)
追尾装置
【課題】大目標と小目標との観測値の取り合いによる追尾性能の劣化を回避し、高精度の航跡を生成可能な追尾装置を得る。
【解決手段】センサ10と、位置相関マトリクスを生成する位置相関処理部20と、セル数相関マトリクスを生成するセル数相関処理部30と、位置相関マトリクスおよびセル数相関マトリクスを用いて相関調停結果を生成する相関調停処理部40と、相関調停結果を用いて観測値クラスタを生成する位置クラスタリング処理部50と、統合セル数観測値を監視する統合セル数観測値監視処理部 60と、カルマンフィルタにより統合セル数推定値および更新後の統合セル数予測値を生成する統合セル数更新予測処理部70と、カルマンフィルタにより航跡の位置速度予測値および位置速度推定値を生成する位置速度更新予測処理部80と、遅延処理部90と、表示処理部100と、を備える。
(もっと読む)
予測装置及び予測システム及びコンピュータプログラム及び予測方法
【課題】観測対象の将来の位置を高い精度で予測する。
【解決手段】観測装置810(位置観測装置)は、移動体(観測対象)の位置を観測する。ジャイロセンサ820(角速度観測装置)は、移動体の角速度を観測する。バイアス補正部141(角速度誤差推定装置)は、観測装置810が観測した位置に基づいて、ジャイロセンサ820が観測した角速度の誤差を推定する。バイアス補正部141(角速度補正装置)は、推定した誤差に基づいて、ジャイロセンサ820が観測した角速度を補正する。運動状態外挿部180(予測位置算出装置)は、バイアス補正部141が補正した角速度に基づいて、移動体の将来の位置を予測する。
(もっと読む)
61 - 70 / 276
[ Back to top ]