
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
1 - 10 / 276
追尾装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
目標追尾装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
レーダ通信装置
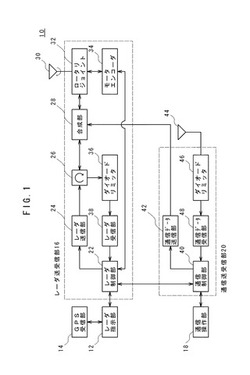
【課題】空中線が回転している他船の船舶と、データ通信可能なレーダ通信装置を提供する。
【解決手段】レーダ通信装置10は、レーダ波の送受信を行うレーダ送受信部16と、通信データの送受信を行う通信送受信部20とを備え、前記通信データを前記レーダ波に合成して送受信することにより空中線が回転する他船と通信するレーダ通信装置であって、前記通信データを受信し、受信した前記通信データを通信送受信部20に供給する通信用空中線44を有する。レーダ送受信部16は、前記通信データを前記レーダ波に合成して、前記レーダ波を送受信するレーダ用空中線30より送信し、通信用空中線44は、無指向性である。
(もっと読む)
追尾装置

【課題】高分解能センサ及び低分解能センサによる航跡に対して正確な割り当てを行うことで、真の目標数分の航跡を生成する。
【解決手段】目標を観測して航跡を生成するセンサ1と、センサ1より低分解能であり、目標を観測して航跡を生成するセンサ2と、センサ1,2により生成された航跡を1対1で割り当てる航跡割当処理部3と、割当結果に応じて、センサ1により生成された航跡を、センサ2により生成された対応する航跡に基づいて更新する第1の航跡更新部5と、割当結果に応じて、センサ1により生成された未割当ての航跡を、センサ2により生成された複数の航跡に基づいて更新する第2の航跡更新部6と、センサ1,2の分解能比に基づいて、第1,2の航跡更新部5,6の動作を制御する分解能比判定処理部4と、更新された航跡を統合する航跡更新統合処理部7とを備えた。
(もっと読む)
航跡統合装置及び航跡統合システム及びコンピュータプログラム及び航跡統合方法
【課題】センサ間の相関処理結果が矛盾しても、相関処理結果を各センサで即時に一意的に決定して、全センサで同一のシステム航跡情報を得る。
【解決手段】相関処理部122(航跡間相関部)は、追尾処理部113が生成した自センサローカル航跡情報と、受信部121が受信した他センサローカル航跡情報433とを照合して、自センサシステム航跡情報422(航跡間対応関係)を生成する。システム航跡情報照合部123は、受信部121が受信した他センサシステム航跡情報434と、自センサシステム航跡情報422とを照合する。システム航跡情報修正部124は、システム航跡情報照合部123によるシステム航跡情報照合結果423を用いて、結果が一致するように自センサシステム航跡情報を修正する。
(もっと読む)
レーダ装置
【課題】DDOA法に基づくレーダ装置においてDOAの不定性を軽減するためのレーダシステムを提供する。
【解決手段】レーダー装置は、距離、方向、速度を記憶するデータ記憶部114と、目標物体150の運動軌跡を予測する追尾予測部115と、レンジの近接を判定し、レンジ制御信号を生成する干渉判定部116と、レンジ制御信号に応じて送信用拡散符号、受信用拡散符号の一方に1チップ未満の位相オフセットを与える符号制御部109と、レンジ制御信号に応じて干渉除去処理を行う干渉分離部110とを備え、干渉分離部110は、レンジ制御信号に応じて、近接する目標物体の当該レンジの信号または当該レンジに隣接するレンジの信号の一方を選択し、距離決定部111、速度検知部112、方向検知部113の入力とする。
(もっと読む)
ドップラーレーダシステム、及び物体検知方法
【課題】受信アンテナの増加を抑制しつつ、物体の位置の検出精度を向上する。
【解決手段】本発明に係るドップラーレーダシステム100は、送信アンテナ120と、複数の受信アンテナ121と、目標物体150に含まれる複数の反射点の各々の位置を示す複数の測定点を算出するマイクロドップラー演算部105と、第1間隔を有する第1分割枠を用いて、測定点の第1重心116aを算出する第1重心算出部106aと、第1間隔より狭い第2間隔を有する第2分割枠を用いて、測定点の第2重心116bを算出する第2重心算出部106bと、複数の第2重心116bの中から、第2重心116bと第1重心116aとの位置関係に基づいて、少なくとも1つの第2重心116bを目標物体150の位置に決定する重心決定部107とを備える。
(もっと読む)
追尾装置
【課題】高い追尾性能を得ることができ、しかも、多目標を追尾する場合であっても処理負荷を低減することができる追尾装置を提供する。
【解決手段】座標系を指定する座標系制御部6と、入力された観測値の座標系を、座標系制御部から指定された座標系に座標変換する観測値用座標変換部1aと、座標系制御部から指定された座標系において、観測値用座標変換部で座標変換することにより得られた観測値と追尾している目標の航跡との相関をとる相関処理部2aと、相関処理部で相関がとられた結果に対して、座標系制御部によって指定された座標系において、フィルタリング処理を実施するフィルタリング処理部4aとを備え、該観測値を取得した機器の動作モードである捜索モード又は追尾モードに応じて、観測値用座標変換部、相関処理部およびフィルタリング処理部で使用する座標系を該追尾装置の運用中に切り換え制御する座標系制御部から構成される。
(もっと読む)
侵入検知システム、侵入検知用子機、侵入検知用親機、侵入検知方法および侵入検知プログラム
【課題】検知対象エリア内のどの場所に侵入者が存在するかを特定することが可能な侵入検知システム、侵入検知用子機、侵入検知用親機、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知用子機102a,102b,102c,102dが送信する無線信号の送信エリアは、侵入検知用親機101の設置位置を含み、かつ侵入検知用子機102a,102b,102c,102d間で互いに異なる。侵入検知用親機101は、侵入検知用子機102a,102b,102c,102dからそれぞれ送信された無線信号を受信し、受信した各無線信号に基づいて、空間特徴量を無線信号ごとに算出し、算出した空間特徴量に基づいて無線信号に対応する送信エリアにおける人間の動作を検知する。
(もっと読む)
移動体位置推定装置、移動体位置推定方法、及び、移動体位置推定プログラム
【課題】移動体がすれ違うなどの観測値と対象物の対応関係が曖昧になるシーンでも、位置推定精度の低下を招かず、対象物の移動経路の推定誤りを引き起こさない、移動体位置推定装置及び方法、並びに、移動体位置推定プログラムを提供する。
【解決手段】識別情報割り当て手段103は、移動体の識別情報と位置情報を低頻度で出力する第1の観測手段101から観測値が得られる時点Aと、時点Aの次に観測手段101から観測値が得られる時点B、及び、時間区間ABにおいて、移動体の位置情報を高頻度で出力する第2の観測手段102から得られる観測値の系列に対して、時点A、Bにおける第1の観測手段101の観測値と第2の観測手段102の観測値の位置の近さが最小になるように、及び、時間区間ABにおける観測手段102の観測値の移動量の合計が最小になるように、第2の観測手段102の観測値に対して第1の観測手段の観測値に含まれる識別情報を割り当てる。
(もっと読む)
1 - 10 / 276
[ Back to top ]