
国際特許分類[G01S13/70]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328) | 距離のみを追跡するためのもの (3)
国際特許分類[G01S13/70]に分類される特許
1 - 3 / 3
対象物を位置特定するための方法およびシステム
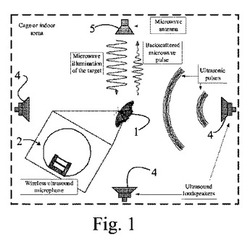
本文書は対象物の位置特定のための方法およびシステムを説明する。対象物(1)は少なくとも一つの第1のタイプの信号を照射され、前記信号の反応を探知する方法を踏まえ。本発明によれば、前記対象物(1)は前記第1のタイプの信号を後方散乱するトランスポンダ(2,3)を取り付けられ、前記トランスポンダ(2,3)は、前記トランスポンダ(2,3)の後方散乱周波数に影響を与える第2のタイプの信号でも照射され、前記トランスポンダ(2,3)からの後方散乱信号は対象物を位置特定するために探知される (もっと読む)
多目標追尾装置

【課題】追尾性能が高く、しかも操作性に優れた小型化可能な多目標追尾装置を提供する。
【解決手段】外部から入力される目標の観測値を用いて複数の目標を追尾する多目標追尾装置において、各目標の状態変数を表す値または相関ゲート内の観測値数の少なくとも1つに基づいて、目標毎に、複数種類の追尾フィルタのいずれを選択するかを判定し、該判定結果に応じた制御信号を生成する追尾フィルタ選択部5と、追尾フィルタ選択部で生成された制御信号によって示される追尾フィルタを実現するための処理を、目標毎に、実行する追尾フィルタ処理部1aおよび3aを備える。
(もっと読む)
サブフレーム同期化測距
【解決手段】通信ノード間の距離を決定する方法である。本方法は、第1のノードから少なくとも1つの第2のノードへの初期通信フレーム送信を含む。初期通信フレームは、フレームプリアンブル、第1のデータ及び第1のスイッチポイントを含む。本方法は更に、フレームプリアンブルに基づいて少なくとも1つの第2のノードのローカルクロックを同期化することを含む。受信されたスイッチポイントに基づいて少なくとも1つの第2のノードを送信ノードに切り換える。少なくとも1つの第2のノードから第1のノードに後続の通信フレームを送信する。後続の通信フレームは、測距プリアンブル、第2のデータ及び第2のスイッチポイントを含む。本方法は、少なくとも1つの第2のノードからの測距プリアンブルに基づいて第1のノードのローカルクロックを同期化し、測距プリアンブルに基づいて第1のノードと第2のノードとの間の距離を決定することによって継続する。 (もっと読む)
1 - 3 / 3
[ Back to top ]