
国際特許分類[G01S13/72]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328) | 二次元追跡のためのもの,例.角度追跡と距離追跡の結合,トラック・ホワイル・スキャン・レーダ (40)
国際特許分類[G01S13/72]に分類される特許
1 - 10 / 40
レーダ装置及び目標位置算出方法
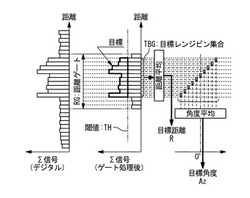
【課題】レーダ装置により算出される目標位置観測値のバタつきを抑制し、目標追尾処理を安定化させること。
【解決手段】本発明に係るレーダ装置(1)は、データ生成部(30)と、目標検出部(42)と、目標距離算出部(43)とを備える。データ生成部(30)は、追尾目標から受信した反射波に関するデータ(DA)を、レンジビン毎に生成する。目標検出部(42)は、距離ゲート(RG)内においてデータ(DA)が閾値レベル(TH)以上であるレンジビンの集合、あるいは、レンジビンの集合に振幅レベルが閾値レベル(TH)未満であるレンジビンがあるものの当該レンジビンの数や幅(隣接レンジビンの振幅レベルが閾値レベル(TH)未満であるレンジビンの数)が規定を満足しており集合と認められるものを、追尾目標に対応する目標レンジビン集合(TBG)として抽出する。目標距離算出部(43)は、目標レンジビン集合(TBG)に属する全レンジビンが示すそれぞれの距離の平均値を、追尾目標への距離である目標距離(R)として算出する。
(もっと読む)
目標追尾装置及び目標追尾方法

【課題】目標の誤追尾を防止して、追尾精度を高めることができるようにする。
【解決手段】センサ1により特定されたプロットに対する類別処理を実施するプロット類別処理部2と、プロット類別処理部2から出力されたプロットの類別結果等を参照して、そのプロットの重心位置を追尾航跡の更新処理に使用するか否かを判定するプロット使用判定処理部3とを設け、追尾処理部4が、プロット使用判定処理部3によりプロットの重心位置を追尾航跡の更新処理に使用する旨の判定が行われた場合、そのプロットの重心位置を用いて追尾航跡を更新し、使用しない旨の判定が行われた場合、そのプロットの重心位置を用いずに追尾航跡を更新する。
(もっと読む)
物標探知方法、物標探知プログラム、物標探知装置、およびレーダ装置
【課題】クラッタを効果的に抑圧することができる物標探知方法を実現する。
【解決手段】まず、1スキャン分の探知データを極座標系で取得し、距離方向と方位方向とを二軸とする二次元座標系で記憶する(S101)。極座標系の二次元座標で記憶された探知データに対して、二次元ウェーブレット変換を複数の解像度で実行する。クラッタの特性に応じて設定された特定の解像度における展開係数分布に基づいて、極座標系からなるマスク画像データの各座標位置のレベルを設定する(S102)。座標位置毎に探知データのレベルからマスク画像データのレベルを減算して、表示画像データを生成する(S103)。
(もっと読む)
レーダ装置
【課題】航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、自動追尾開始時における誤追尾による目標表示を抑制したレーダ装置を得る。
【解決手段】追尾演算部17でのスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として、目標の表示用の追尾情報としての目標レポートに含めて操作表示部18に送出する。一方、複数の操作表示部18a〜18cにおいては、この相関・連結成功回数に対して、監視対象に合わせた最適なしきい値kdspがそれぞれに設定されており、受けとった目標レポートの中から、このしきい値kdspを超えた相関・連結成功回数を有するものを表示対象の目標レポートとして選択し、その目標を画面上にシンボル表示する。
(もっと読む)
多目標追尾装置
【課題】誤警報等の不要信号が発生する環境下で、信号強度が弱い場合でも、運動が変化する目標の航跡の確立を早期に行うことができるとともに、演算負荷を軽減させることができる多目標追尾装置を提供する。
【解決手段】多目標追尾装置100は、センサとしてのレーダ10から観測値の信号を受ける。多目標追尾装置100は、観測値蓄積部1と、2次元相関決定追尾処理部2と、航跡確立判定部3と、不確定領域判定部4と、多次元相関決定追尾処理部5と、多次元サンプリング数制御部6とを有している。多目標追尾装置100は、全観測領域の観測値を用いて2次元相関決定追尾処理を行い、目標の有無が確定しない領域のみで、その領域で得られる観測値に対して多次元相関決定追尾処理を適用する。
(もっと読む)
航跡表示装置
【課題】 この発明は、遅延決定型の航跡決定方式において、過去および最新の航跡決定における誤りを是正することができ、オペレータの意思決定に必要な航跡情報をより正確に表示することができる航跡表示装置を提供する。
【解決手段】 航跡判定部110は前回抽出航跡を保管しており、今回抽出航跡が前回と異なる観測値から構成されている場合、航跡表示情報生成部140は前回抽出された航跡から生成された航跡のうち最高尤度を持つ航跡と今回航跡による尤度差比較を行い、比較結果に応じて航跡の表示形態を決定する。
(もっと読む)
目標検出・追尾装置
【課題】レンジウォーク補償量の誤差を低減するとともに、誤差の低減されたレンジウォーク補償量によるレンジウォーク補償処理により、後段での積分処理の効果を確実なものとし、目標検出性能を向上させた目標検出・追尾装置を得る。
【解決手段】レンジウォーク補償量を算出する際に、極座標系の目標の検出情報から、目標の運動がより実際に近いものとして表現される直交座標系の状態ベクトルを算出し、この状態ベクトルからパルス毎のレンジウォーク補償量を算出することにより、その誤差を低減する。また、誤差の低減された補償量を用いたレンジウォーク補償処理によって信号の積分処理時の積分効果を高め、目標の検出性能を向上させる。
(もっと読む)
レーダ装置
【課題】直下クラッタ、メインローブ・クラッタ及びサイドローブ・クラッタの影響を受けずに安定した追尾の維持、継続が可能となるレーダ装置を得る。
【解決手段】直下クラッタの発生領域と目標信号の検出位置がレンジ方向で近接していない送信信号のパルス繰り返し周期(PRI)を選択する直下クラッタ評価処理321と、メインローブ・クラッタの発生領域と目標信号の検出位置がドップラ周波数方向で近接していない送信信号のパルス繰り返し周期を選択するメインローブ・クラッタ評価処理323と、サイドローブ・クラッタの発生領域と目標信号の検出位置がレンジ方向及びドップラ周波数方向で近接していない送信信号のパルス繰り返し周期を選択するサイドローブ・クラッタ評価処理325とを含む信号処理器3を備える。
(もっと読む)
レーダ装置及びレーダ信号処理方法
【課題】 追尾性能を向上させたレーダ装置及びレーダ信号処理方法を提供する。
【解決手段】 アンテナ部20は、レーダ信号の送信及び受信を行なう。目標検出部40は、アンテナ部20が受信した受信信号に基づいて、所定の捜索領域を捜索して目標を検出する。追尾処理部50は、目標検出部40が検出した目標を追尾するための追尾処理を行う。レーダ制御部10は、目標検出部40による捜索領域の捜索を制御する。レーダ制御部10は、捜索領域を方位方向に複数の領域に分割し、複数の領域のそれぞれを更に距離方向に分割して、隣り合う分割領域の一部が重複するように複数の分割領域を生成し、同一の方位について、分割領域間の捜索に時間差が生じるように、捜索順序を設定する。
(もっと読む)
目標追跡装置及び目標追跡方法
【課題】低SNR環境下においても目標を高精度に検出・追跡できるようにする。
【解決手段】目標追跡装置は、TBD(Track Before Detect)アルゴリズムを用いて受信信号から目標を検出する第1検出処理器6と、その検出結果をもとに目標を追跡する第1追跡処理器とを備える第1信号処理部4と、第1検出処理器6より高レートで受信信号から目標を検出する第2検出処理器10と、その検出結果をもとに目標を追跡する第2追跡処理器11とを備える第2信号処理部8と、第1検出処理器6で目標が検出されなかった場合は第1信号処理部4のみを実行させ、第1検出処理器6で目標が検出され、かつ第2検出処理器10で目標が検出されなかった場合は、第1信号処理部4と第2信号処理部8とを併用させ、第2検出処理10で目標が検出された場合は第2信号処理部8のみを実行させるように、受信信号の処理系統を判定する処理判定器3とを具備する。
(もっと読む)
1 - 10 / 40
[ Back to top ]