
国際特許分類[G01S13/74]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の再放射を使用する方式,例.二次レーダ方式;類似の方式 (999)
国際特許分類[G01S13/74]の下位に属する分類
受信波から電力供給を受ける応答機を使用するもの,例.受動的応答機を使用するもの (109)
パルス形信号を送信するもの (203)
ランダム符号信号またはランダムパルス繰返数を使用する方式 (108)
持続形信号を送信するもの (23)
国際特許分類[G01S13/74]に分類される特許
41 - 50 / 556
立体映像対応型ICカード処理装置
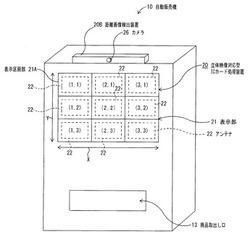
【課題】選択対象物を立体映像で表示する表示区画部を有し、ICカードのタッチ行為位置とリーダ・ライタの読書き可能位置とを一致させ、読込み・書込みを行えるようにする。
【解決手段】この装置は、立体映像で表示する表示区画部21A、非接触ICカード25が表示区画部の正面位置にかざされたときに非接触ICカードの第1の位置情報(X,Y)を検出するためアンテナ22、非接触ICカードとの間で読書きを行うリーダ・ライタ23、表示区画部の位置の情報、選択対象物に係る立体映像の表示位置の情報を記憶する記憶部24、表示区画部に対してタッチ行為がなされた非接触ICカードの表示区画部からの第2の位置情報(Z)を検出する距離画像検出装置20B、第1と第2の位置情報(X,Y,Z)が記憶された立体映像の表示位置と一致したとき選択対象物を確定しリーダ・ライタで非接触ICカードの情報の読書きを行う処理装置20Cを備える。
(もっと読む)
遠隔ロケーションにおけるRFIDベースの誘導

【課題】区域内でユーザを位置特定するため、および誘導するための誘導位置特定システム等を提供する。
【解決手段】クエリ信号40を送信し、応答信号42を受信するように構成されたRFID(無線周波数識別)読取りデバイス14と、区域内に配置されたRFIDタグ8を含む。RFIDタグは、その区域内のRFIDタグのロケーションに関連付けられた固有の情報を格納する。RFIDタグのそれぞれは、RFID読取りデバイスからクエリ信号を受信し、その固有の情報を伝送する応答信号をRFID読取りデバイスに送信するように構成される。RFID読取りデバイスは、応答信号を利用して、その区域内のそのRFID読取りデバイスの現在のロケーションを特定するように構成される。
(もっと読む)
向き推定方法、向き推定装置及び端末装置
【課題】利用者の向きを推定することを課題とする。
【解決手段】向き推定サーバ10は、利用者によって携帯される端末装置30に搭載された角速度センサ33Bの出力から得られる相対方位角を記録する。さらに、向き推定サーバ10は、利用者の向きを特定可能な第1の地点における利用者の向きを特定する。さらに、向き推定サーバ10は、記録した相対方位角のうち第1の地点に対応する相対方位角および第1の地点と異なる第2の地点の相対方位角と、第1の地点で特定された利用者の向きとを用いて、第2の地点における利用者の向きを推定する。
(もっと読む)
二次監視レーダ及び監視方法
【課題】拡張スキッタを利用して、航空機の捕捉の精度を向上する。
【解決手段】第1トラックファイル生成手段と、第2トラックファイル生成手段と、抽出手段と、抽出手段が抽出した航空機に送信する質問を生成する質問生成手段と、生成した質問を送信する送信手段とを備える。第1トラックファイル生成手段は、航空機から送信された拡張スキッタに含まれる航空機の識別子及び当該航空機の位置と、計時手段から取得した受信時刻とを関連付けて第1トラックファイルデータに追加する。第2トラックファイル生成手段は、航空機から送信された応答に含まれる航空機の識別子及び当該航空機の位置と、受信時刻とを関連づけて第2トラックファイルデータに追加する。抽出手段は、第1トラックファイルデータに含まれる位置及び受信時刻と、第2トラックファイルデータに含まれる位置及び受信時刻とを利用して、所定の位置に存在する航空機を抽出する。
(もっと読む)
レーダ装置及び監視方法
【課題】航空機の予測位置を正確に特定し、捕捉する。
【解決手段】モードS二次監視レーダは、航空機データ記憶部と、質問生成部と、算出部と、更新部とを備える。航空機データ記憶部は、次のスキャンにおける航空機の位置情報である予測位置を含む航空機データを記憶する。質問生成部は、ロールコール期間において、航空機データに含まれる航空機に対し、ロールコール質問又は航空機に搭載されるトランスポンダのGICBレジスタのパラメータを含む応答の送信を要求する要求信号を生成し送信手段に出力する。算出部は、受信手段がロールコール質問に対して受信した応答に含まれる航空機の位置又はGICBレジスタのパラメータに含まれる航空機の動態情報から当該航空機の予測位置を算出する。更新部は、算出部で算出された予測位置で航空機データを更新する。
(もっと読む)
動態監視システム
【課題】同一範囲内に存在する複数のRFIDタグ情報を検出することにより、その検出結果をセキュリティに活用する動態監視システムを提供する。
【解決手段】RFIDタグに記憶された情報を読み取るRFID読み取り部11と、予め登録済みのRFIDタグ情報を記憶するRFID登録情報記憶部21と、RFID読み取り部11で読み取ったRFIDタグ情報とRFID登録情報記憶部21に予め登録済みのRFIDタグ情報との認証を行うRFID認証部22と、RFID認証部22で認証された移動体の位置情報を記録する位置情報記憶部14と、RFID認証部22の情報を表示する表示部23と、を備えた動態監視システムにおいて、RFID登録情報記憶部21は、前記RFIDタグの登録情報を拡張し、前記RFIDタグ情報に紐づけられた所定の付加情報を記憶する追加登録情報記憶部24を有する。
(もっと読む)
マルチラテレーションシステム
【課題】信号の送信タイミングを二次監視レーダの動作に対応させて、二次監視レーダにおける航空機の監視を妨げない。
【解決手段】マルチラテレーションシステムは、応答処理部と、タイミング生成部と、送信部とを備える。応答処理部は、レーダ装置の質問信号に対して航空機が送信した応答信号を入力し、当該応答信号を解析してレーダ装置と航空機との信号の送受信のタイミングを特定する。タイミング生成部は、予め入力されたレーダ装置のアンテナの回転速度と、応答処理部で特定されたタイミングとから、アンテナが航空機と異なる方向を向いているタイミングを航空機への質問信号の送信タイミングとする。送信部は、タイミング生成部で生成されたタイミングで、質問信号を送信する。
(もっと読む)
交信処理装置および交信処理装置における距離計測方法
【課題】RFIDタグまでの距離を計測する方法として、実際の交信処理の設定に対応可能な計測を実現する。
【解決手段】交信処理装置1に、高周波信号発振器11Bと中間周波発振器11Aとを組み込み、これらの発振器11A,11Bを用いて中間周波信号が重畳された搬送波を生成し、アンテナ10から送出する。またミキサ16i,16qにより、アンテナ10が受信した信号中の中間周波信号からI信号のQ信号とを分離して抽出する。位相差検出部112は、タグ2からの反射波の受信が開始された後のI信号およびQ信号を用いて、搬送波中の中間周波信号に対する反射波中の中間周波信号の位相差を検出する。距離算出部113は、位相差と中間周波信号の波長とを用いてアンテナ10からタグ2までの距離を算出する。
(もっと読む)
交信処理装置および交信処理装置における距離計測方法
【課題】交信処理の効率を損なうことなく、タグまでの距離を精度良く計測する。
【解決手段】コマンドが重畳された搬送波を送出する処理と無変調搬送波(CW)を送出してタグ2からの応答を受け付ける処理とを交互に実行する交信処理装置1において、送信制御部111は、タグ2からの反射波の受信が開始されたことに応じて送受信回路100から送出される無変調搬送波の位相を切り替える。送受信回路110には、タグ2からの反射波に含まれるI信号およびQ信号を分離して検出する回路が含まれており、位相検出部112は、I信号およびQ信号を用いて反射波の位相の変化を検出する。距離算出部113は、無変調搬送波の位相が切り替えられた時点から反射波の位相に無変調搬送波の位相の変化に対応する変化が検出される時点までの時間を計測し、その時間を用いてアンテナ10からタグ2までの距離を算出する。
(もっと読む)
気象情報提供システム及び気象情報提供方法
【課題】ドップラエコーがない領域に存在する目標の風向風速情報を取得することができ、目標の離発着時のより品質の高い気象情報に特化した観測を行うことも可能であり、得られた風向風速情報を有効に伝えることができるようにする。
【解決手段】空港観測用に特化した、ブラッグ散乱エコー対応の気象レーダ13を用い、ASR/SSR11で検出される航空機の位置・高度情報に対応する降雨及び風向風速情報を取得し、さらに気象予測モデル処理装置14から位置・高度情報に対応する気象予測情報を取得して、それぞれターゲットレポート情報に付加し、当該レポート情報を管制官、パイロットへ適切に送信する。
(もっと読む)
41 - 50 / 556
[ Back to top ]