
国際特許分類[G01S13/76]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の再放射を使用する方式,例.二次レーダ方式;類似の方式 (999) | パルス形信号を送信するもの (203)
国際特許分類[G01S13/76]の下位に属する分類
国際特許分類[G01S13/76]に分類される特許
101 - 110 / 165
モードS二次監視レーダ
【課題】オールコールにおける同一モードSアドレスが重複受信されたときでもロールコールによる監視への移行が可能となり、また以降のオールコールにおけるターゲット検出率の低下を回避する。
【解決手段】オールコール期間に送信されたモードS一括質問に対する応答を受信したとき、監視処理器39は、受信されたモードSアドレスが他の応答のモードSアドレスと重複しているか否かを判定する。
この監視処理器39における判定により、モードSアドレスが重複していると判定されたとき、重複したモードSアドレスの各応答に対応した各個別質問に、GICBレジスタ情報の送信要求を含むシーケンスを付加してロールコールを行うように制御するので、ロールコールによる監視が実現できる。
またロックアウトにより、後続のオールコール期間におけるターゲット検出率低下は回避される。
(もっと読む)
半導体装置、及び半導体装置を用いた位置検出システム

【課題】無線通信を行って、RFIDが空間において存在するか存在しないか、またそのRFIDが所有しているIDなどの情報を取得するほか、そのRFIDの位置を特定する。
【解決手段】複数の質問器とサーバーとをネットワーク接続して、位置検出システムを構築する。RFIDと質問器とで無線通信を行うことで、各質問器からRFIDまでの距離を求め、その距離のからRFIDの位置を求める。質問器からRFIDまでの距離を算出するには、RFIDで質問器から受信した信号の振幅に応じた周波数で信号を発振させる。RFIDで発振している信号の周波数を、RFID内でまたは質問器で検出することにより、質問器からRFIDまでの距離を検出する。
(もっと読む)
応答器
【課題】応答信号強度の低下を抑止しつつ2種類以上の応答信号を生成させる。
【解決手段】質問器200からユーザの所在を問合せる無線信号が発信された時に、応答器100のスイッチをオフ状態にすると、応答器は第1の応答無線信号xをその発信元の質問器に返信する。一方、応答器のスイッチをオン状態にすると、応答器は第2の応答無線信号yをその発信元の質問器に返信する。すなわち、この応答器は、スイッチのオン/オフに応じて、バッテリレスで2種類の応答無線信号を切り替えて返信することができる。
(もっと読む)
探索対象物探索装置
【課題】探索対象物との距離を精度良く割り出すことができるようにする。
【解決手段】探索対象物に設けられた探索対象物側装置1〜5から、到達距離の異なる5種類の電波21a〜21eを送信させる。各電波21a〜21eの到達距離が5m、10m、15m、20m、25mであり、探索装置10が到達距離25mの電波21eと到達距離20mの電波21dと到達距離15mの電波21cとを受信している場合、受信した電波の種類を報知するレベルメータ16により、探索者が探索対象物から10m以上15m以内の位置にいることが報知される。
(もっと読む)
無線送信器、無線受信器ならびに無線送信器および無線受信器を有するシステムおよび方法
本発明は、無線送信器(1,4)に関するものであり、この無線送信器には、少なくとも、連続信号(sFMTx(t))を形成する信号発生器(SGEN1)と、送信信号(sTx(t))を送出するアンテナ(ANT1)とが含まれている。上記の信号発生器(SGEN1)の少なくとも1つの出力側と、アンテナ(ANT1)の少なくとも1つの入力側とが接続されている。上記の送信信号発生器(SGEN1)とアンテナ(ANT1)とは、これらの間に接続された遮断ユニット(SW1)を介して接続されており、この遮断ユニットにより、上記の送信信号発生器(SGEN1)とアンテナ(ANT1)との間の信号接続が選択的に遮断または保持される。 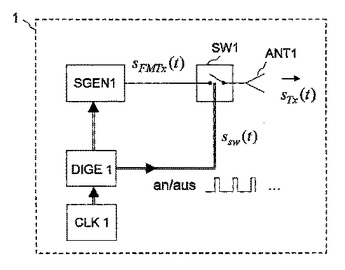 (もっと読む)
(もっと読む)
UWBレーダによる共振タグの検出
検出システムは、UWB電磁放射のパルスによる照射に対する磁気共鳴応答を有する物質を検出するための受信機を有し、上記受信機は、パルスが物質と相互に作用した後にパルスを検出するための検出器(40、45)と、検出されたパルス内で物質の磁気共鳴応答を識別するように設けられた識別器(55)とを有する。磁気共鳴応答を有する物質を有するタグ(20)でタグ付けされたアイテムを、上記アイテムをUWBパルスで照射し検出されたパルス内で物質の磁気共鳴応答を識別して走査することによって、アイテムは位置づけられ、イメージングされ、又は起動されることが可能である。タグの磁気共鳴応答は、タグの起動を引き起こすことができる。タグは、異なるタグをそのシグネチャによって識別しかつ区別化できるように識別可能な磁気共鳴のシグネチャを提供するように設けられた磁気共鳴応答を有することが可能である。 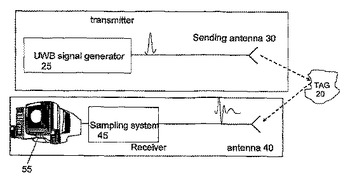 (もっと読む)
(もっと読む)
RF技術を用いた物体の追跡における低減された減衰のための方法およびシステム
無線周波数(RF)ベースの物体の識別、追跡、および位置特定のための方法およびシステム。本方法およびシステムは、より低い周波数範囲のVHFで狭帯域幅信号を使用し、伝搬損失およびRF位置特定信号の精度の低下を最小限に抑える。信号は、マスタユニットからタグまで送信される。信号移動時間が記録され、マスタとタグとの間の距離が計算される。本方法およびシステムは、VHF帯域を使用することによって、より長距離のRF信号の透過および正確さの向上を達成することができる。デジタル信号処理およびソフトウェア規定無線技術が使用される。無線によって送受信される実際の波形は、ソフトウェアによって定められる。マスタユニットおよびタグの役割は、逆にすることができる。 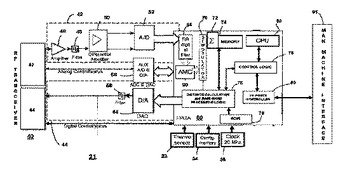 (もっと読む)
(もっと読む)
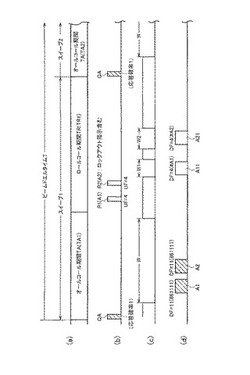
位置検出装置
【課題】安価な計時装置を使って無線端末の位置を計測したり、精度の高い位置計測を行える位置検出装置を得る。
【解決手段】電波を発信する発信端末10と、発信された電波を受信する受信端末20を持ち、発信端末は発信する電波を時間的に変化させるとともに、受信端末は、発信端末の発信電波と同じタイミングで変化を開始し発信端末の発信電波より少ない変化率を持つ参照電波と、発信端末からの受信電波を比較し、同一変化量になるまでの時間により、発信端末と受信端末間の距離を測定する。
(もっと読む)
検証された距離測定
デバイス間の距離を検証することに関する種々の技術が説明される。2デバイス間の距離は、一方のデバイスに対し、もし該デバイスが他方のデバイスから高々所与の距離にある場合に限り可能である結果を生成する、1又は複数の対応処置をとることを要求することによって検証されることが可能である。ある複数の態様では、検証される測距は、測距信号と応答信号の使用によって達成される。ある複数の態様では、測距信号は、ランダム・シーケンス、擬似ランダム・シーケンス、或いは確定シーケンスを具備することが出来る。応答デバイスは、既知の関数に従って測距信号に作用して応答信号を生成することが出来る。測距デバイスは又、該測距デバイスが応答デバイスへ送信した測距信号に対して応答デバイスが適切に演算した可能性を判定するための動作を実行することが出来る。 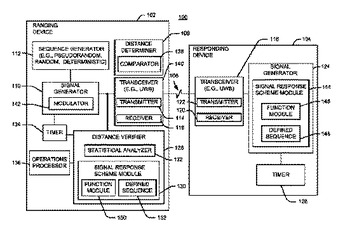 (もっと読む)
(もっと読む)
無線通信装置
【課題】同期処理が不要で、消費電力の小さな無線通信装置を提供する。
【解決手段】互いに無線通信する第1無線機1と第2無線機2とを備え、第1無線機1は、距離測定信号を送信するとともに、距離測定信号の送信タイミングで送信タイミング信号を出力する送信回路3と、折り返し信号を受信するとともに、折り返し信号の受信タイミングで受信タイミング信号を出力する受信回路5と、送信タイミング信号に対する受信タイミング信号の時間差を遅延時間として測定する遅延時間測定回路7と、遅延時間に基づいて、第1無線機1と第2無線機2との距離を演算する距離演算回路8とを含み、遅延時間測定回路7は、並列に接続され互いに遅延特性の異なる複数の遅延回路D1〜Dnを有し、送信タイミング信号を複数の遅延回路D1〜Dnを介して遅延させた遅延送信タイミング信号と、受信タイミング信号とを用いて遅延時間を測定するものである。
(もっと読む)
101 - 110 / 165
[ Back to top ]