
国際特許分類[G01S13/86]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式と非レーダ方式,例.ソーナ,方位測定機,との結合 (221)
国際特許分類[G01S13/86]に分類される特許
1 - 10 / 221
障害物検出装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
レーダー探知機
【課題】設置後の見栄えを損なうことなく簡単且つ安価に導入することができ、しかも、受信端末と処理端末との間の通信機能が一時的に途切れたとしても所期の機能が妨げられることのないレーダー探知機を提供する。
【解決手段】この発明において、レーダー波受信端末12と警報通知端末14との間で授受される信号は、取締機が発するレーダー波の信号であるが、これは、走行中の車の進行方向や走行速度を演算するために用いられるGPS信号のように連続性やリアルタイム性が要求されるようなものではなく、瞬間的にでも信号の授受が行われれば良いものである。したがって、レーダー波受信端末12と警報通知端末14との間の通信状態が一時的に途切れるようなことがあっても、レーダー波信号の授受が瞬間的にでも確立できればレーダー探知機能を有効に発揮させることができ、レーダー探知機10全体としての機能が損なわれることはない。
(もっと読む)
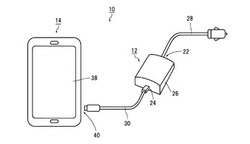
レーダー探知機

【課題】簡単且つ安価に導入することが可能なレーダー探知機を提供する。
【解決手段】レーダー波を受信するレーダー波受信用アンテナ16と、該レーダー波受信用アンテナ16において受信したレーダー波の信号をブルートゥース(登録商標)を用いて無線転送するマスター側ブルートゥースデバイス20とを備えるレーダー波受信端末12、および該無線転送されたレーダー波の信号を受信するスレイブ側ブルートゥースデバイス32と、該スレイブ側ブルートゥースデバイス32にて受信したレーダー波の信号の種類を特定する警報通知端末用プロセッサ36と、該特定結果に対応する警報を通知する警報通知手段38とを備える警報通知端末14により構成されるレーダー探知機10であって、使用されるブルートゥースプロトコルがSPPプロトコル、OPPプロトコル或いはPBAPプロトコルから選ばれた少なくともいずれか1つであることを特徴とする。
(もっと読む)
無線タグリーダおよび監視システム
【課題】無線タグの方向探知精度がよい無線タグリーダを提供する。
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
(もっと読む)
物体検出装置
【課題】歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供する。
【解決手段】車両に搭載されたカメラ100によって撮像された画像に基づいて物体40の種類を判定する物体種類判定部102と、車両に搭載された電磁波を送信するレーダ20の受信信号に基づいて物体40に関する情報を検出するレーダ物体検出部211と、前記レーダ20を制御するレーダ制御部200とを備え、レーダ制御部200は、物体種類判定部102が判定した物体40の種類に応じて、レーダ20の距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
絶対速度推定装置
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
障害物検知装置及びコンピュータプログラム
【課題】障害物検知装置1101において、障害物の誤検知を抑制する。
【解決手段】電波を送信する送信アンテナ1001と、前記送信された電波が障害物により反射された電波を受信する受信アンテナ1002と、前記受信された電波に基づいて障害物を検知する障害物検知部311と、前記検知された障害物について、あらかじめ設定された誤検知の特徴の有無を判定する誤検知判定部1011と、画像を撮像するカメラ302と、前記誤検知の特徴があることが判定された障害物について、前記カメラ302により撮像された画像に基づいて、当該障害物の有無を判定する障害物有無判定部1012と、を備える。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、強度が第1閾値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅を算出する物体幅算出手段33と、物体の幅が所定幅以上である幅広の物体に係る反射波の強度等が特定の状況にある場合、第1閾値よりも大きな第2閾値により、幅広の物体に係る物体範囲を分割する物体範囲分割手段36と、その物体範囲の分割後の各範囲に対応する画像データに基づき、目的物を検出する処理を行う目的物検出手段39とを備える。
(もっと読む)
物体検知装置
【課題】画像処理による負荷を極力増大させることなく歩行者等の存在を検知できる物体検知装置を提供する。
【解決手段】物体検知装置は、各探知領域内の強度が所定値以上である反射波の方向の範囲を物体が存在する物体範囲として、物体の幅及び位置を算出する幅・位置算出手段33と、各物体の幅及び位置に基づき、装置の前方に、各探知領域と交差する路面が存在し、各探知領域における物体範囲が分離していると判定された場合、物体範囲の分離している部分に対応する画像データに基づき、検知対象である目的物の有無を検出する目的物検出手段39とを備える。
(もっと読む)
1 - 10 / 221
[ Back to top ]