
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
91 - 100 / 202
レーダシステム
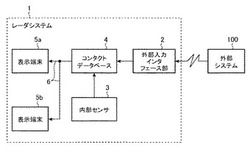
【課題】内部のセンサから入力される情報に加え、外部から入力される情報を統合して表示し、優れた拡張性を有するレーダシステムを提供する。
【解決手段】内部センサ3と、外部から入力される情報を受け付ける外部入力インタフェース部2と、内部センサ3および外部入力インタフェース部2から入力される情報を蓄積するコンタクトデータベース4と、コンタクトデータベース4に蓄積された情報を表示する表示端末5とを備え、コンタクトデータベース4は、内部センサ3および外部入力インタフェース部2から入力される情報に基づいた個別テーブルを蓄積する複数の個別データベース42,43と、複数の個別データベース42,43に蓄積された個別テーブルを結合して結合テーブルを生成するテーブル結合処理部41と、テーブル結合処理部41において生成された結合テーブルを蓄積する結合データベース44を備える。
(もっと読む)
バイスタティックレーダ装置

【課題】送信側と受信側の距離が未知であって、かつ、時刻同期をとらなくても目標位置を同定できる安価なバイスタティックレーダ装置を提供する。
【解決手段】目標および第1レーダ装置に向けて電波を送信する第2レーダ装置と第1レーダ装置とを備え、第1レーダ装置は、第2レーダ装置を検出するモノスタティック検出器3aと、検出された第2レーダ装置までの距離R0・角度θ0を計測する第1測距器4a・第1測角器5aと、第2レーダ装置からの電波に基づき第2レーダ装置を検出するセミアクティブ検出器7aと、検出された第2レーダ装置までの距離・角度θ3を計測する第2測距器8a・第2測角器9aと、角度θ0および角度θ3に基づき算出した第1レーダ装置から見た目標の角度θ1、距離R0と第2測距器で計測された距離との距離差ΔRおよび距離R0を用いて目標までの距離R1を算出して目標位置を同定する目標位置同定器6を備えている。
(もっと読む)
ネットワーク化された波形システム
ある実施形態では、環境内の異なる地理的位置に配置された複数のレーダを含むネットワーク化された波形システムを提供する。複数のレーダは、ネットワーク波形信号を送信するように構成され得る。ネットワーク波形信号は複数のレーダ波形信号を含む。複数の波形信号のそれぞれは複数のレーダのうちの特定のレーダにより送信され得る。システムはプロセッサ及びメモリを有する、複数のレーダと一体となったコンピュータシステムを含む。メモリは、複数のレーダから受信したデータ、プロセッサにより処理されたデータ、及びプロセッサによって実行可能な処理コードを含む情報を格納するように構成される。処理コードは、送信されたネットワーク波形信号の結果として得られる、複数のレーダからの出力データを受信する命令と、ネットワーク波形信号に基づいて、環境の測定結果を判定するために複数のレーダからの出力データを統合処理する命令と、を含んでよい。 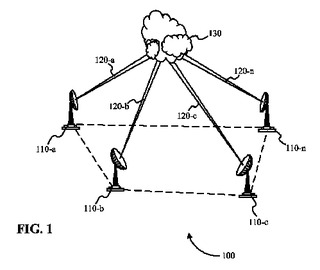 (もっと読む)
(もっと読む)
レーダ装置およびその表示制御方法およびプログラム
【課題】複数の空中線を有するレーダ装置において、操作員による監視を容易にし、目標の探知を見落とす危険性を低くする。さらに高速で移動する複数の目標の位置をリアルタイムに表示させる。
【解決手段】第1、第2、・・・、第Nのレーダ系統から出力された第1、第2、・・・、第Nの表示用信号の距離データを、検出された目標が互いに異なる距離となるように変換した第1、第2、・・・、第Nの距離データ変換信号を出力する距離データ変換手段と、距離データ変換手段から出力された第1、第2、・・・、第Nの距離データ変換信号の角度データを、互いに同一角度となるように変換した第1、第2、・・・、第Nの角度データ変換信号を出力する角度データ変換手段とを備える。
(もっと読む)
同一航跡判定装置
【課題】仮説生成前に同一性を判定できる見込みを推定し、見込みのあるものに対してのみ計算を実行することにより、計算機資源を有効利用し、単位時間に多くの相関結果を出力することができる同一航跡判定装置を得る。
【解決手段】従来の同一航跡判定装置の尤度算出部9に仮説生成判定部10を取りつけ、仮説生成判定部10が、仮説生成を行う前に信頼度の大きな仮説を2つ事前に抽出し、仮説が絞り込めないときに抽出した仮説の比が一定値以上となることを利用して仮説生成の有無を判定し、仮説が絞り込める可能性のある場合には、仮説生成部11に仮説の生成を行わせ、仮説が絞り込める可能性がない場合には、仮説生成部11に仮説の生成を行わせない。
(もっと読む)
レーダ装置
【課題】 レーダ部における個々の周波数帯域や観測する角度を制御して、任意の周波数帯域を選択可能なレーダ部を使用した場合においても、目標の推定姿勢及び各レーダ部の使用可能帯域から各レーダ部の空間周波数領域上の観測領域を算出し、空間周波数領域での所望の信号領域を観測する新規なレーダ装置を提供すること。
【解決手段】 リソース管理部から出力される各レーダ部の観測可能な方位・時間・送信周波数・周波数帯域から目標姿勢推定処理部が推定した目標が観測された時刻以降の所定の時刻毎に前記目標の姿勢と前記各レーダ部とのアスペクト角をそれぞれ算出し、観測条件算出部に入力された観測条件を満たす空間周波数領域上の信号領域である要求領域に対し、目標の姿勢となすアスペクト角が一致するレーダ部の観測領域の割り当てを決定し、この割り当てに基づいて複数のレーダ部に目標を観測させる観測計画算出部とを備えたことを特徴とする。
(もっと読む)
レーダ装置
【課題】
カメラを用いずに、自車の前方に存在する二台の車両の中間地点に車両が存在している、という誤検知を回避することを目的とする。
【解決手段】
レーダシステムは、自車左前方に設置された第1のレーダ装置と、自車右前方に設置された第2のレーダ装置と、を備え、前記第1及び第2のレーダ装置は、それぞれ、前方に存在する複数の物体を分離して検出するための分解能の間隔をおいて設置される。第1及び第2のレーダ装置の電波照射範囲は、それぞれ、自車の走行路上で重複し、かつ、左右の隣接車線路上で重複しないように調整されてもよい。又、第1のレーダ装置の電波照射範囲から得られる検出結果、及び、第2のレーダ装置の電波照射範囲から得られる検出結果との差異に基づいて、自車の前方に存在する複数の物体を分離して検出してもよい。
(もっと読む)
追尾装置及びプログラム及び追尾方法
【課題】複数の異なるセンサ装置が目標を観測した結果に基づいて、目標を追尾する。
【解決手段】トラック記憶部181は、複数のセンサ装置それぞれが観測した目標に関する情報を表わす複数のトラックデータを記憶する。トラック記憶部181が記憶したトラックデータが更新された場合、優先度算出部141は、更新されたトラックデータの優先度を算出する。共通データ更新部144は、優先度算出部141が算出した優先度が高い場合に、更新されたトラックデータを、共通データ記憶部182に共通データとして記憶させる。
(もっと読む)
センサ統制システム
【課題】探知覆域の組合せ数が増大した場合でも計算機リソースの制限を考慮して探知覆域の最適化処理の高速化および効率化を図る。
【解決手段】探知覆域算出部は、同一センサに対する各探知性能値テーブルのメッシュ配列を分割した各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最良のメッシュを持つセンサを選択し、当該センサにおいて、最良メッシュを含む近傍の複数メッシュを対象として対応する各テーブルの探知性能値をそれぞれ加算し、その加算値が最良なメッシュを選択してそのメッシュの方位・仰角を当該センサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて該当センサの覆域形状を算出する。
(もっと読む)
マルチスタティックレーダ装置
【課題】送信側のレーダ装置と受信側のレーダ装置と距離が未知の場合であっても直接波の影響を排除できるマルチスタティックレーダ装置を提供する。
【解決手段】送信側のレーダ装置から送信された電波を受信側のレーダ装置で受信して目標を検出するマルチスタティックレーダ装置において、受信側のレーダ装置は、送信側のレーダ装置から送信された電波を受信する主アンテナ1と、送信側のレーダ装置から送信された電波を受信する補助アンテナ11aと、主アンテナからの信号に基づき生成された主チャンネル信号の振幅と補助アンテナまたは主チャンネルからの信号に基づき生成された補助チャンネル信号の振幅とを比較する振幅比較器6と、振幅比較器により主チャンネル信号の振幅が補助チャンネル信号の振幅より大きい場合に、該主チャンネル信号に基づき目標の検出および測角を行う検出/測角器5を備えている。
(もっと読む)
91 - 100 / 202
[ Back to top ]