
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
111 - 120 / 202
物体検出装置
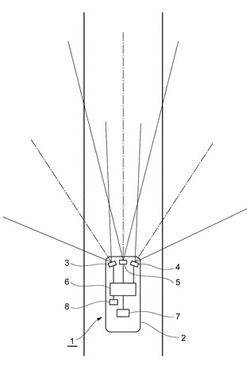
【課題】二つの検知手段の検知結果に基づいてゴースト判定を行うことにより、適切な物体検出が行える物体検出装置を提供すること。
【解決手段】車両2の前方にある物体を検知するレーダ5、及び車両2の前側方にある物体を検知するレーダ3、4を備え、レーダ5により物体をトラッキングしている際にその物体より近距離の位置に他の物体が検知された場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5トラッキングの対象とするか否かを判断して物体検出を行う。この場合、レーダ3、4の検知結果に基づいて他の物体をレーダ5のトラッキングの対象とするか否かを判断することにより、他の物体が大型車の反射などによるゴーストであるか否かを的確に判断することできる。
(もっと読む)
レーダ装置

【課題】強風等の天候に影響されることなく、目標とする航空機を容易にかつ確実に検出追尾可能なレーダ装置を提供する。
【解決手段】高低方向及び方位方向において航空機等の目標までの距離及びドップラー周波数成分が一致することを利用して、目標情報検出器21にて高低空中線装置11及び方位空中線装置12で得られる目標までの距離及びドップラー周波数成分が一致するか否かを判定し、一致する場合に目標と判定し、この目標の旨のメッセージと「距離」、「高度」及び「方位」の数字情報を表示器16に供給して高低方向表示領域及び方位方向表示領域に表示させるようにしている。
(もっと読む)
レーダ装置
【課題】複数のレーダ画像の投影面が一致しない場合にも、目標の高分解能画像を生成することが可能なレーダ装置を得る。
【解決手段】複数の異なる位置に配置され、目標を観測する複数のレーダと、複数のレーダで得られる受信信号スペクトルの投影面を一致させる処理を行う投影面補償手段19と、複数のレーダで得られる受信信号スペクトルの位相を一致させる処理を行う相互コヒーレント化手段3と、相互コヒーレント化手段で位相を一致させた受信信号スペクトルを、レンジ方向またはクロスレンジ方向に内挿または外挿して帯域幅を拡張した連続スペクトルを生成する帯域拡張手段4と、帯域拡張手段で生成された連続スペクトルのレンジとクロスレンジをそれぞれ圧縮する圧縮手段5及び6とを備える。
(もっと読む)
物体検出装置および方法、ならびに物体検出装置を備えた車両
【課題】電磁波によってその物体を検出した時点におけるその物体の移動速度および移動方向を求める。
【解決手段】電磁波を送信し物体から反射される電磁波を異なる位置で受信するレーダヘッド201,202と、レーダヘッド201,202から出力される受信信号より少なくとも物体の相対速度および方位を求めるレーダ信号処理部311,312とを有する複数のレーダ装置と、その複数のレーダ装置によって求められる物体の相対速度および方位を用いて、その物体の移動ベクトルを算出する移動ベクトル検出部402とを備える。
(もっと読む)
検出装置および方法
【課題】方向検出技術を簡便かつ精度よく実現できるようにする。
【解決手段】速度距離センサ1は、目標物3と自身の間の直線距離を距離R1として検出し、自身の位置における目標物3の相対速度を速度V1として検出する。速度センサ2は、自身の位置における目標物3の相対速度を速度V2として検出する。かかる速度距離センサ1と速度センサ2とを搭載した検出装置は、距離R1、速度V1、および速度V2をパラメータ値として利用して、距離R、距離RR、角度θ3を演算し、角度θ3を目標物の方向として出力し、距離Rまたは距離RRを目標物の距離として出力する。本発明は、レーザレーダによる方向検出技術に適用可能である。
(もっと読む)
屋内迷子捜索システム
【課題】引率者からはぐれてしまった人の現在位置を精度良く特定する屋内迷子捜索システムを提供する。
【解決手段】屋内迷子捜索システムは、登録した人が履く靴の靴底に付けら且つ個体識別番号が記憶されたRFIDカードと、床面に設置され且つ上記登録した人が履く靴の靴底が接近したときに上記RFIDカードから個体識別番号を読み取るリーダと、屋内を見渡せる箇所に設置され且つ捕捉した人の位置を検出するレーダと、上記リーダの設置位置と上記レーダが捕捉した人の位置との相関を求めるとともに相関が認められるときには上記レーダが捕捉した人が上記RFIDカードを付帯していると判定し上記個体識別情報および位置情報を含むリーダ・レーダ情報を送出し、且つ相関が認められた位置に居る人を以後上記レーダおよび上記リーダにより追尾し上記リーダ・レーダ情報を送出する検索者検出装置と、を有する。
(もっと読む)
接近通報用のレーダ波中継装置
【課題】見通しの悪い交差点などにおける車両(移動物体)の出会い頭の衝突を防止する。
【解決手段】移動物体からのレーダ波を受信するレーダ波受信部21Aと、該レーダ波受信部21Aで受信されたレーダ波を該移動物体に向けて折り返し送信する折り返し送信部23Aと、該折り返し送信部23Aから送信された折り返しレーダ波の該移動物体での反射波を受信する反射波受信部25Aと、該折り返しレーダ波と該反射波とから該移動物体の速度情報に応じた周波数信号Δfaを検出する速度情報検出部26Aと、該速度情報検出部26Aにて検出された前記周波数信号Δfaと該レーダ波が送信されてきた方向とは異なる他方向に位置する他の移動物体からの折り返しレーダ波とをミキシングして前記他方向へ送信する速度情報付加送信部30Bとをそなえる、ようにする。
(もっと読む)
目標追尾装置、目標追尾プログラム及び目標追尾方法
【課題】高分解能センサにより同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化の低減を図るとともに、目標の航跡の高精度化を目的とする。
【解決手段】検出情報決定部120は、複数の検出装置から取得した検出情報の内、1つの検出装置から取得した検出情報に基づき目標の追尾を行うか、あるいは2つ以上の検出装置から取得した検出情報に基づき目標の追尾を行うかを所定の条件に基づき選択する。また、検出情報決定部120は、選択した結果に基づき、目標の追尾に使用する検出情報を決定する。追尾処理部140は、決定された検出情報に基づき目標を追尾する。
(もっと読む)
航跡統合装置及びプログラム及び航跡統合方法
【課題】センサが目標を観測した観測データに基づいて推定した目標の航跡を表わす複数のセンサ航跡データを統合して、精度の高い統合航跡データを生成する。
【解決手段】航跡入力部210は、複数のセンサ航跡データ510を入力する。航跡精度算出部260は、航跡入力部210が入力したセンサ航跡データ510に基づいて、航跡精度評価値を算出する。航跡精度評価値は、センサ航跡データの精度を表わす。重み付け算出部270は、航跡精度算出部260が算出した航跡精度評価値に基づいて、航跡調整係数を算出する。航跡調整係数は、センサ航跡データの重み付けを表わす。統合航跡生成部280は、重み付け算出部270が算出した航跡調整係数に基づいて、センサ航跡データを統合し、統合航跡データ580を生成する。
(もっと読む)
物体検知装置
【課題】送信波を送信する送信部と反射波を受信する受信部との位置が離れていても、簡易な構成で、物体の検知精度を高めることができる、物体検知装置の提供を目的とする。
【解決手段】レーダー1とレーダー2とを互いに間隔を空けて備える、物体検知装置であって、レーダー1の送信波とその送信波がターゲットに反射してレーダー1で受信された反射波との関係、並びにレーダー1の送信波がターゲットに反射してレーダー2で受信された反射波とレーダー1の送信波が漏洩してレーダー2で受信された漏洩波との関係、に基づいて、当該ターゲットを検知することを特徴とする、物体検知装置。
(もっと読む)
111 - 120 / 202
[ Back to top ]