
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
161 - 170 / 202
レーダ装置
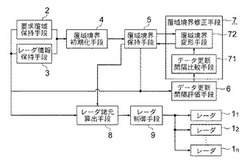
【課題】各レーダで探知すべき覆域を最適化し、短いデータ更新間隔で要求覆域を探知できるレーダ装置を得る。
【解決手段】要求覆域を保持する要求覆域保持手段2と、レーダ情報を保持するレーダ情報保持手段3と、覆域境界を表す覆域境界情報を保持する覆域境界保持手段5と、要求覆域、レーダ情報及び覆域境界情報に基づき、複数のレーダのそれぞれの覆域を求め、覆域を探知するために必要な時間であるデータ更新間隔を評価するデータ更新間隔評価手段6と、データ更新間隔評価手段6の出力に基づき、覆域が隣接するレーダ間のデータ更新間隔の差が減少するように、覆域境界情報を修正して覆域境界保持手段5に記録する覆域境界修正手段7と、要求覆域、レーダ情報及び修正された覆域境界情報に基づき、複数のレーダの各々に対するレーダ諸元を算出するレーダ諸元算出手段8と、レーダ諸元に基づき、複数のレーダを制御するレーダ制御手段9とを設けた。
(もっと読む)
空間的に離れた少なくとも2つのアンテナユニットを備えるレーダシステム
レーダシステム(1)は、空間的に離れた少なくとも2つのアンテナユニット(U1,U2,U3,U4,U5,U6,U7,U8,U9,U10,U11,U12,U13,U14,U15,U16,U17,U18)を備え、各ユニットは1つのアンテナ(2,3,4,5,6,7,8,9,21;36,37,38,39,40,41,42,43,56)を備える。アンテナ(2,3,4,5,6,7,8,9,56)に接続された信号発生器(13,14,15,16,17,18,19,20,57)を備えたアンテナユニット(U1,U2,U3,U4,U5,U6,U7,U8,U18)それぞれは、送信アンテナユニット(U1,U2,U3,U4,U5,U6,U7,U8;U18)を構成する。そして、アンテナ(21,36,37,38,39,40,41,42,43)に接続された受信機(22;47,48,49,50,51,52,53,54)を備えたアンテナユニット(U9;U10,U11,U12,U13,U14,U15,U16,U17)それぞれは、受信アンテナユニット(U9;U10,U11,U12,U13,U14,U15,U16,U17)を構成する。少なくとも1つの受信アンテナユニット(U9;U10,U11,U12,U13,U14,U15,U16,U17)は、少なくとも1つの送信アンテナユニット(U1,U2,U3,U4,U5,U6,U7,U8;U18)から送信され少なくとも1つの対象物(24)から反射された信号を含む、少なくとも1つの反射信号を受信するように構成される。ここで、アンテナユニット(U1,U2,U3,U4,U5,U6,U7,U8,U9;U10,U11,U12,U13,U14,U15,U16,U17,U18)の数は2を超える。処理ユニット(23)は、少なくとも1つの受信信号を、数学的処理を行った複製信号のセットと比較して、相関計算を実行するように構成される。このセットから、各反射信号に対して、ただ1つの整合する複製信号がある。本発明はまた対応する方法にも関する。 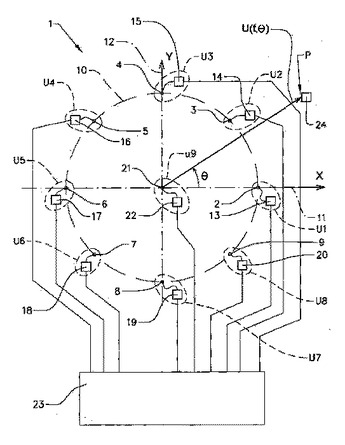 (もっと読む)
(もっと読む)
目標追尾装置

【課題】早期に高精度な着弾位置の推定値を得るように、どのセンサがどの目標をいつからいつまで観測するかの効率のよいセンサの割当てスケジュールを決定する目標追尾装置を得る。
【解決手段】複数のセンサ4a〜4dにより複数の目標1a〜1dを観測し、この観測結果に基づき、追尾処理部5により追尾処理を行い、この追尾処理された追尾情報に基づいて軌道推定部7により目標の着弾までの軌道情報を推定し、次いで、この軌道情報に基づいて、要求精度算出部8により、満たすべき追尾精度要求を算出し、この算出された追尾精度要求を満足するように、どのセンサがどの目標をいつからいつまで観測するかの割当てスケジュール10を割当て部9により決定し、センサ制御部11がこの割当てスケジュール10どおりに複数のセンサ4a〜4dを制御するようにした。
(もっと読む)
電波レンズアンテナ装置
【課題】バイスタティック方式が採用される電波レンズアンテナ装置において、安価かつ簡単な構成で、ボリュームスキャンを行うことができる電波レンズアンテナ装置を提供することを目的とする。
【解決手段】電波レンズアンテナ装置1は、球形の送信用の電波レンズ2と、球形の受信用の電波レンズ3と、電波レンズ2の焦点部に配置された一次放射器4と、電波レンズ3の焦点部に配置された一次放射器5と、一次放射器4、5を保持するとともに、電波レンズ2、3の中心点を結ぶ軸Aを回動軸として、仰角方向Yに回動可能に設けられたアーム12と、軸Aに垂直な軸Bを回動軸として、方位角方向Xに回動可能に設けられたテーブル8を備えている。そして、一次放射器4、5が、アーム12の回動動作に連動して、軸Aを回動軸として、仰角方向Yに回動するとともに、テーブル8の回動動作に連動して、軸Bを回動軸として、方位角方向Xに回動する。
(もっと読む)
ミリ波を用いた位置検出装置
【課題】水蒸気及び/又は粉塵を含む雰囲気下においても例えばスラブ等の被検出物を高精度に検出すること。
【解決手段】例えば製鉄所の圧延工程において、水蒸気及び/又は粉塵を豊富に含む雰囲気中を搬送手段例えばローラコンベア22により搬送される被検出物であるスラブ2の搬送経路を横切るように、所定の周波数例えば60GHzのミリ波を送信する発信部3と、この発信部3からのミリ波を受信する受信部4とを対向配置して構成される位置検知器を搬送方向に沿って複数組配置し、当該受信部4が受信した検出信号に基づいてスラブ2が通過したか否かを判別する。この場合、直進性の高いミリ波は水蒸気や粉塵などの浮遊微粒子に遮られることが少ないので、高精度にスラブ2を検出することができる。
(もっと読む)
ボール計測装置
【課題】天候や明るさの影響を受けにくく且つ精度よく弾道計測が可能なボール計測装置の提供。
【解決手段】打撃位置から着地位置までのボールの弾道、着地位置及び停止位置を計測可能なボール計測装置100である。このボール計測装置100は、上記打撃位置から上記弾道の所定位置までの計測が可能で且つ少なくとも一つの送信アンテナ及び複数の受信アンテナを備えた第一のミリ波レーダ装置1と、上記停止位置の計測が可能で且つ少なくとも一つの送信アンテナ及び複数の受信アンテナを備えた第二のミリ波レーダ装置2と、上記複数の受信アンテナにより受信された信号に基づいてボールの三次元座標を算出する演算部とを有している。第一のミリ波レーダ装置1と第二のミリ波レーダ装置2とは互いに異なる位置に設置されている。
(もっと読む)
位置測定方法及び位置測定装置
【目的】 複数の広角レーダ装置を用いて目標物の位置測定する場合において位置測定精度を向上する「位置測定方法及び位置測定装置」を提供することである。
【構成】 複数の広角レーダ装置を用いて目標物の位置を測定する場合、各広角レーダ装置は、目標物を含む複数の物体を分離することが不可能になったとき該広角レーダ装置から出力する位置データにフラグを付加し、位置決定部は、各広角レーダ装置から出力されるいずれの位置データにもフラグが付加されていなければ、各広角レーダ装置から出力される位置データを用いて加重平均により目標物の位置を決定し、いずれかの位置データにフラグが付加されていれば、該位置データを除外して目標物の位置を決定する。
(もっと読む)
分散ネットワーク・レーダ装置
【課題】 複数のレーダを使用して探知能力の拡大を図るレーダ装置において、車載移動型捜索レーダのように、設置場所が探索の都度に移動するために各レーダの周囲の地形環境が変化する場合であっても、電波干渉の影響を受けることなく、探知能力の拡大を図ることができる分散ネットワーク・レーダ装置を提供する。
【解決手段】 レーダ1とレーダ2を相互にネットワーク連接し、前記各レーダ間の送受信同期のために送受信同期部7−1で制御し、前記各レーダ毎に設置された送信部1−1及び2−1から互い相異なる周波数チャンネルの電波を目標3に向かってアンテナ1−3及び2−3を介して放射し、前記目標3で反射された全ての周波数チャンネルの電波を前記各アンテナ1−3及び2−3を介してそれぞれで受信し、各受信信号の電力振幅検出、ビデオ積分、測角演算、平均演算を行うようにした。
(もっと読む)
レーダシステム
【課題】 クロスレンジ分解能を向上し、マルチパス環境下においても測角精度を確保することができ、妨害環境下においても探知/追尾性能を確保することができるレーダシステムを提供する。
【解決手段】 目標4の捜索範囲又は追尾範囲、所望のクロスレンジ分解能、レーダ装置1,2の距離分解能に応じて決定された離隔距離Lだけ互いに離隔してレーダ装置1,2を配置し、レーダ装置1から目標4までの距離Rt1が基準距離を超える場合には、レーダ装置1で測角して生成された方位情報に基づいて目標4の位置を特定し、基準距離以下の場合には、レーダ装置1,2で測定して生成された距離情報に基づいて目標4の位置を特定する。
(もっと読む)
位置管理システムおよび位置管理プログラム
【課題】 位置検知が必要な空間内の様々な検知対象物の3次元位置情報をより精度良く認識する位置管理システムおよび位置管理プログラムを提供する。
【解決手段】 本発明の位置管理システムAは、位置が検知される検知対象物41,42に設けられた、互いの検知能を補完し合う二種以上の検知用タグ(超音波タグ26、RFIDタグ36)と、検知用タグの種類別に設けられ、検知用タグからの信号を受信すると当該検知用タグに付された固有のタグIDと、自己に付されている装置IDと、を含む検知結果データを生成する検知装置21,31と、取得した検知結果データと、検知装置21,31の配置データとに基づいて処理することで検知対象物41,42の位置を特定する位置データ処理装置1とを備えている。
(もっと読む)
161 - 170 / 202
[ Back to top ]