
国際特許分類[G01S13/87]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ方式,例.一次レーダと二次レーダ,の結合 (202)
国際特許分類[G01S13/87]に分類される特許
51 - 60 / 202
目標追尾装置、目標追尾方法、及びプログラム

【課題】センサを有効活用して多くの目標を追尾可能とする。
【解決手段】目標追尾手段10は、センサ装置61、62の観測値から、目標の探知や、目標の状態を推定する。センサ状態管理手段20は、センサ装置61、62の状態を管理する。目標軌道予測手段30は、目標の状態から、目標の将来位置を予測する。センサ割当・方位変更計算手段40は、センサの状態と目標の将来位置とから、ネットワークの経路探索を行うことにより、センサ割当スケジュールと方位変更スケジュールとを算出する。センサ制御装置50は、センサの状態、目標の将来位置、センサ割当スケジュール、及びセンサ方位変更スケジュールから、目標追尾と方位変更とを指示する。センサ装置61、62は、センサ制御装置50からの指示に従って、目標追尾と方位変更とを実行する。
(もっと読む)
拡張現実におけるオブジェクトの追跡
一般的に、オブジェクトを追跡するための技術が説明される。いくつかの実施例では、システムは、モバイルフォンおよび拡張現実デバイスを備えてよい。モバイルフォンは、送信波を受信し、オブジェクトから反射された反射波を受信するのに有効である。モバイルフォンは、送信波と反射波との間の差異を判定し、判定された差異に基づいて第1の追跡データを生成するように構成され得る。拡張現実デバイスは、第1の追跡データを受信し、第1の追跡データに基づいてオブジェクトの位置に関する第2の追跡データを判定するように適応され得る。判定された第1の追跡データおよび第2の追跡データに基づいてディスプレイ上で画像が生成され得る。 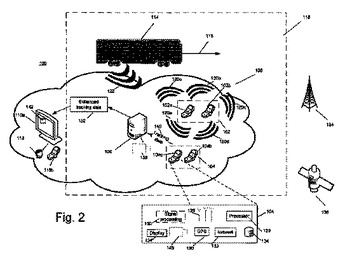 (もっと読む)
(もっと読む)
レーダ装置

【課題】定常的な変化と非定常的な変化を識別し分析作業効率の向上を図ったレーダ装置を提供する。
【解決手段】波動を照射し観測対象で反射した波動を受信し観測対象を画像化するレーダ装置であり、観測対象の同一領域の3つ以上のレーダ画像を相対的に短い短時間差と相対的に長い長時間差で得るレーダ画像生成手段001A−B,011,012,013,014と、短時間差および長時間差についてそれぞれに2つのレーダ画像の相互相関を計算して相互相関画像を生成する画像相関手段015と、短時間差における相互相関が第1の所定値よりも小さくなる領域を定常変化領域として抽出し、長時間差における相互相関が第2の所定値よりも小さくなる領域でかつ前記短時間差における定常変化領域以外の領域を非定常変化領域として抽出する変化領域判定手段016,017と、を備えた。
(もっと読む)
空港面監視方法及び空港面監視システム
【課題】 複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供すること。
【解決手段】 一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得る。
(もっと読む)
移動体管理装置
【課題】タグを有しない移動体を的確に判定することのできる移動体管理装置を得る。
【解決手段】ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成する。移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する。動線比較部5は、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける。判定部6は、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する。
(もっと読む)
レーダ情報処理システム及びレーダ情報処理方法
【課題】複数のレーダ装置の受信信号から検出された目標に関する情報を正確に同期表示させること。
【解決手段】第1レーダ装置1及び第2レーダ装置2は、空中線11、21を同一周期で回転させてレーダパルスを送受信して、目標検出部13、23により目標を検出する。データ処理装置3は、第1レーダ装置1及び第2レーダ装置2により検出された複数の目標情報を同期させて出力する。第1レーダ装置1及び第2レーダ装置2は、目標検出処理前後の方位値を目標情報に付加してデータ処理装置3に出力し、データ処理装置3は、目標検出処理前後の方位値をもとに複数の目標情報を基準値に合わせて遅延させる。
(もっと読む)
物体までの距離および/または物体の相対速度の明確な判定を行うための方法、運転者支援デバイス、および車両
本発明は、自動車(1)の中の周波数変調連続波レーダ(3、4)によって、自動車(1)に対する物体までの距離、および/または物体の相対速度の明確な判定を行うための方法に関する。周波数変調連続波レーダ(3、4)は、1回の測定サイクルの中で、所定のシーケンスの周波数変調信号パルス(23)を送信し、そのシーケンスによって、距離に対する明確エリア(RUn)、および/または相対速度に対する明確エリア(VUn)が判定される。この場合、距離に対する互いに異なる明確エリア(RUn)、および/または相対速度に対する互いに異なる明確エリア(VUn)が、連続する少なくとも2回の測定サイクルに対して規定され、距離および/または相対速度は、それぞれの場合に、各測定サイクルから得られる距離および/または相対速度に対する少なくとも1つの測定値に基づいて判定される。 (もっと読む)
目標物探知装置および目標物探知方法
【課題】失探した目標物と、新たに探知された目標物を関連付け同一目標物であることを明確にし、目標物を継続して探知できる目標物探知装置および目標物探知方法を提供する。
【解決手段】レーダ装置ごとの覆域領域と、予め決められた領域から覆域領域を除いた領域を区分した覆域外領域との隣接に関する情報と、覆域外領域間の隣接に関する情報と、レーダ装置の覆域外へ移動した目標物を最後に探知した位置と日時と覆域領域と該目標物の速度、種別を、目標物の識別子に対応付けた失探情報と、レーダ装置が新たに探知した目標物の情報と、に基づいて、該失探した目標物と新たな目標物を関連付ける目標物探知装置である。
(もっと読む)
近距離レーダ装置及び測距方法
【課題】簡易な構成でありながら、高分解能での距離測定等が可能な近距離レーダ装置を提供する。
【解決手段】2系統の送受信部10,20と、処理部30とを備えたものとする。一方の送受信部10は、送信波と受信波との差周波数を持つ第1中間周波信号V1を出力し、他方の送受信部20は、第1周波数と異なる第2周波数の送信波を送受信部10と同時に放射するとともに、送信波と受信波との差周波数を持つ第2中間周波信号V2を出力する。処理部30は、これらの中間周波信号V1,V2の比較結果に基づいてターゲット100までの距離Lを表すデータを出力する。
(もっと読む)
電波受信装置及び到来方向測定方法
【課題】レーダ波の到来方向を、精度良く、短時間で求めることができ、かつ小さなハードウェア規模を実現することが可能な電波受信装置及び到来方向測定方法を提供する。
【解決手段】まず、アンテナ11−2,11−3からの受信波に基づいて、粗測角処理器153で振幅モノパルス方式を利用して、レーダ波の到来方向を測定する。その後、アンテナ11−1,11−4からの受信波に基づいて、精測角処理器154でインターフェロメータ方式を利用すると共に、粗測角の結果を参照して、レーダ波の到来方向を測定する。
(もっと読む)
51 - 60 / 202
[ Back to top ]