
国際特許分類[G01S13/88]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 特定の応用に特に適合したレーダ方式または類似の方式 (1,783)
国際特許分類[G01S13/88]の下位に属する分類
マッピングまたはイメージング用のもの (348)
交通制御用のもの (112)
衝突防止目的のもの (1,014)
地形回避用のもの (5)
気象用のもの (129)
国際特許分類[G01S13/88]に分類される特許
71 - 80 / 175
協調型飛翔体システム
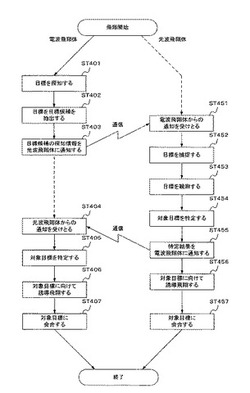
【課題】同時に複数で飛来する目標の中から対象目標を特定した上で、これら対象目標に対して効果的に対処することのできる協調型飛翔体システムを得る。
【解決手段】電波により目標を検知する電波飛翔体と、光波により目標を検知する光波飛翔体とが互いに通信可能な範囲を飛翔しながら、電波飛翔体は、探知した目標の中から対処の対象となる目標候補を抽出して光波飛翔体に通知し、光波飛翔体は、この通知に基づき目標候補を詳細に観測して対処の優先度を評価した上で自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。一方、電波飛翔体も、光波飛翔体による目標候補に対する評価結果の通知を受けて自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。
(もっと読む)
物体探知装置

【課題】探知エリア内の物体の探知を自動的に行うことでユーザの負担を軽減することができる物体探知装置を提供する。
【解決手段】物体探知装置は、電磁波を送受波するアンテナ部3を含む装置本体4を基準面に沿って自動的に移動させる自動移動手段10と、物体を探知した位置を記録する記録手段9とを備える。自動移動手段10は、探知エリアを設定する探知エリア設定部21と、探知エリア内での装置本体4の移動経路となる探知経路を決定する経路生成部22と、探知エリア内での装置本体4の現在位置を認識する位置認識部14と、装置本体4を移動させる駆動手段23と、前記探知経路に従って装置本体4が移動するように駆動手段23を制御する駆動制御部24とを有する。
(もっと読む)
物体探知装置
【課題】対象物および基準面に沿って等間隔で配列された非対象物の中から対象物のみを検出することができる物体探知装置を提供する。
【解決手段】各アンテナ位置で受信された受信信号の強度をサンプリングタイミングごとに強度データとし、強度データのアンテナ位置ごとの集合を位置毎データ列として記憶部5に記憶するサンプリング手段9と、位置毎データ列に基づいて各非対象物にそれぞれ対応するアンテナ位置の集合が1区画となるように、複数のアンテナ位置を複数の区画に区画化する区画化手段13と、複数の区画について位置毎データ列を平均化したものを各区画にそれぞれ当て嵌めることでパターンデータ列を生成するパターン生成手段14と、位置毎データ列からパターンデータ列を減算して補正反射波成分を算出する補正反射波算出手段15と、補正反射波成分から対象物の状態を検出する解析手段16とを備える。
(もっと読む)
埋設物探知センサ
【課題】磁気センサの検出感度を向上させた複合型の埋設物探知センサを提供する。
【解決手段】受信部16及び送信部18からなる磁気センサ12と電波センサ14を備え、電波センサ14を構成する複数のアンテナ要素を受信部16の外周上に配置し、さらに受信部16を中心として、電波センサ14の外周上に送信部18を配置した埋設物探知センサ10である。受信部16は、一対の半円形状のコイル20を対称に組み合わせて円形とし、コイル20のコイルパターン方向を互いに反対に形成した。
(もっと読む)
埋設深さ測定方法及びその装置
【課題】埋設物の埋設深さの測定誤差を低減し、測定精度を上げることを目的とする。
【解決手段】検査媒体中に埋設された埋設物の埋設深さ測定方法である。送信部と受信部を平面上に近接配置した第1送受信ユニット26の第1送受信データと、前記第1送受信ユニット26と同一平面上であって送信部と受信部の中心に前記第1送受信ユニットの中心を配置した第2送受信ユニット30の第2送受信データとから得られる最も短い反射時間の伝播速度を演算処理して、見かけ上の埋設物の埋設深さを求め、前記埋設物の埋設深さに対して送受信ユニットと検査媒体との間の空隙により生じる屈折率の補正を行い、実際の反射時間を求めて前記埋設物の埋設深さを補正演算する。
(もっと読む)
セミアクティブ式誘導装置
【課題】レーザー光の照射時間を短くし、高精度の誘導を行なうセミアクティブ式誘導装置を提供する。
【解決手段】飛しょう体に搭載される誘導装置本体は、パルス光の反射光から追跡目標を抽出するパルス同期反射光抽出部と、追跡目標に反射した可視光又は赤外線のから追跡目標を抽出する光源抽出部とを備える。追跡目標が遠距離にある場合にはパルス光に同期したパルス同期画像を基に誘導開始時に追跡目標を判定し、追跡目標が追跡目標に反射した可視光又は赤外線の撮像画像から判定するに十分な距離に近づいたとき可視光又は赤外線の撮像画像から追跡目標を判定するように選択を切替える。
(もっと読む)
合成開口レーダ装置
【課題】飛翔経路方向の3次元空間に存在する目標を高分解能かつ高精度で観測して追尾することができる合成開口レーダ装置を提供する。
【解決手段】 飛翔体に搭載される合成開口レーダ装置であって、飛翔体の飛翔経路軸に対して円錐状に形成されるビームのクロスレンジ方向の分解能をあげて目標を含む画像を生成する合成開口レーダ処理部1〜8と、合成開口レーダ処理部により生成された画像に含まれる目標が最小になるよう飛翔経路中心を設定する飛翔経路中心設定部9と、飛翔経路中心設定部で設定された飛翔経路中心と目標の中心とが一致するように飛翔体を誘導する誘導制御部10を備えている。
(もっと読む)
地中探査レーダ用アンテナ
【課題】地中埋設物の3次元の位置を迅速にかつ正確に検出する。
【解決手段】導電性アンテナハウジング2に形成された複数の部分収納空間に、送受信一対のアンテナ素子1a,1b;1c1,1c2;1d1,1d2の3組が配置される。これらのアンテナ素子は、一対の導体5a,5b,5c1,5c2,5d1,5d2,6a,6b,6c1,6c2,6d1,6d2が一直線上に配置されて、ダイポールアンテナを構成する。導体は、波長をλとするとき、λ/2の長さを有し、1組のアンテナ素子1a,1bと各組のアンテナ素子1c1,1c2;1d1,1d2とは、これらの導体の長手方向に、λ/2だけずれて配置される。各組の送信アンテナ素子1a,1c1,1d1に与えられるパルス状送信信号と、各組の受信アンテナ素子1b,1c2,1d2から得られる受信信号との時間差に基づき、地中埋設物の距離、したがって位置を検出することができる。
(もっと読む)
地中探査装置
【課題】使用時には画像出力部を視認性の良好な位置に配置し、非使用時には画像出力部やハンドルをコンパクトな収納姿勢とすることのできる地中探査装置を提供する。
【解決手段】ハンドル13が台車10上に滑節部13aと操作部13cとを有し、台車10に回動可能に支持されて画像出力部16の一端側を回動可能に支持する支持リンク22が、ハンドル13と交差するようその中間結合部13fに回動可能に結合され、画像出力部16の他端側が、中間結合部13fより操作部13c側でハンドル13に結合された連結リンク24によって回動可能に支持され、操作部13cが上方に操作されるときリンク22、24によって画像出力部16が回動され、操作部13cが使用高さに達すると、連結リンク24の中間部24cが支持リンク22の先端部22bに支持されるとともに、画像出力部16が使用姿勢で停止するように構成する。
(もっと読む)
電磁波レーダによる鉄筋コンクリート構造物中の鉄筋径の非破壊計測装置及び非破壊計測方法
【課題】鉄筋コンクリート構造物中の異形鉄筋の径を簡便に計測する非破壊計測方式を提供すること。
【解決手段】送信アンテナと受信アンテナとを備えた電磁波レーダを異形鉄筋に沿って鉄筋コンクリート構造物表面を走査し所定ピッチ毎に電磁波の送受信を繰り返すステップと、前記異形鉄筋から反射される電磁波の伝播時間を時系列的に格納するステップと、前記格納された前記伝播時間の時系列データを周波数分析するステップと、前記周波数分析による最大ピーク位置に基づいて前記異形鉄筋の節の平均間隔を求めるステップと、前記平均間隔に従って、所定の対応表に基づいて鉄筋径を判断するステップと、を備える。
(もっと読む)
71 - 80 / 175
[ Back to top ]